LiDARはLight Detection and Rangingの略で、光をパルスレーザーとして送り、周囲の物体との距離(可変距離)を測定するセンサーテクノロジーです。現在では、多くの最先端アプリケーションに欠かせない技術となっています。しかし、多くの製品が提供されているため、アプリケーションに適したものを選ぶのは、時に非常に面倒なことです。さまざまな種類のLiDARがある中で、どのように使い分ければいいのでしょうか?また、LiDARの性能を評価する上で重要な仕様とは何でしょうか?このブログでは、LiDARの仕様について説明し、LiDARの潜在的なアプリケーションと使用例を紹介します。
LiDARの仕様説明
LiDARの検出範囲
多くのLiDARの仕様の中で、センサーを評価する際に最も重要なのは検出範囲でしょう。これは、物体を検出できる最も遠い距離を指します。これはレーザー光源のパワーに大きく依存し、パワーが高ければ高いほど、LiDARはより遠くまで物体を検出することができます。レーザーの最大出力は、目の安全に関する規制によって制限されています。また、レーザーの種類や開口サイズなどの仕様、反射する物体の特性(サイズ、距離、反射率、拡散反射や鏡面反射など)、天候や温度などの外部影響も、LiDARの到達範囲を決定する要因です。
長い検出範囲が重要になる例として、侵入検知システムがあります。壁やフェンスに沿ってLiDARを設置し、あらかじめ決められた範囲に侵入した物体を検知することで、侵入を監視することができます。また、アルゴリズムによって物体を分類し、特定の基準を満たした場合のみ警報を発することも可能です。しかし、LiDARの検出範囲はまだ制限されることがあります。特に壁が長く、LiDARの検出範囲が限られている場合、フールプルーフのセキュリティのためには、複数のLiDARセンサーで全周囲をカバーする必要が出てくるのです。そのため、システムを管理しやすく、また経済的にも実現可能な長距離型のLiDARが望まれます。
LiDARの検出範囲は、物体を検出できる最も遠い距離を示しています。
検出距離を決定する要因は、大きく3つの異なるカテゴリーに分けることができます。
– LiDARの特性(例:レーザーの種類、レーザー光源の出力、開口部の大きさなど)
– 外部からの影響(例:雨、霧、雪、太陽光など)
– 対象物の特性(例:サイズ、距離、反射率、拡散反射、鏡面反射など)
Blickfeld社のCubeは、MEMSベースのLiDARとしては例外的に大きな範囲を持っています。これは、ミラーの直径が10ミリ以上あり、そのため開口部も大きいという独自の設計によるものです。これにより、反射した光子の高い割合が光検出器に導かれ、Cubeは最大250m離れた弱い反射の物体も確実に検出することができます。
LiDARのレンジ精度と正確度
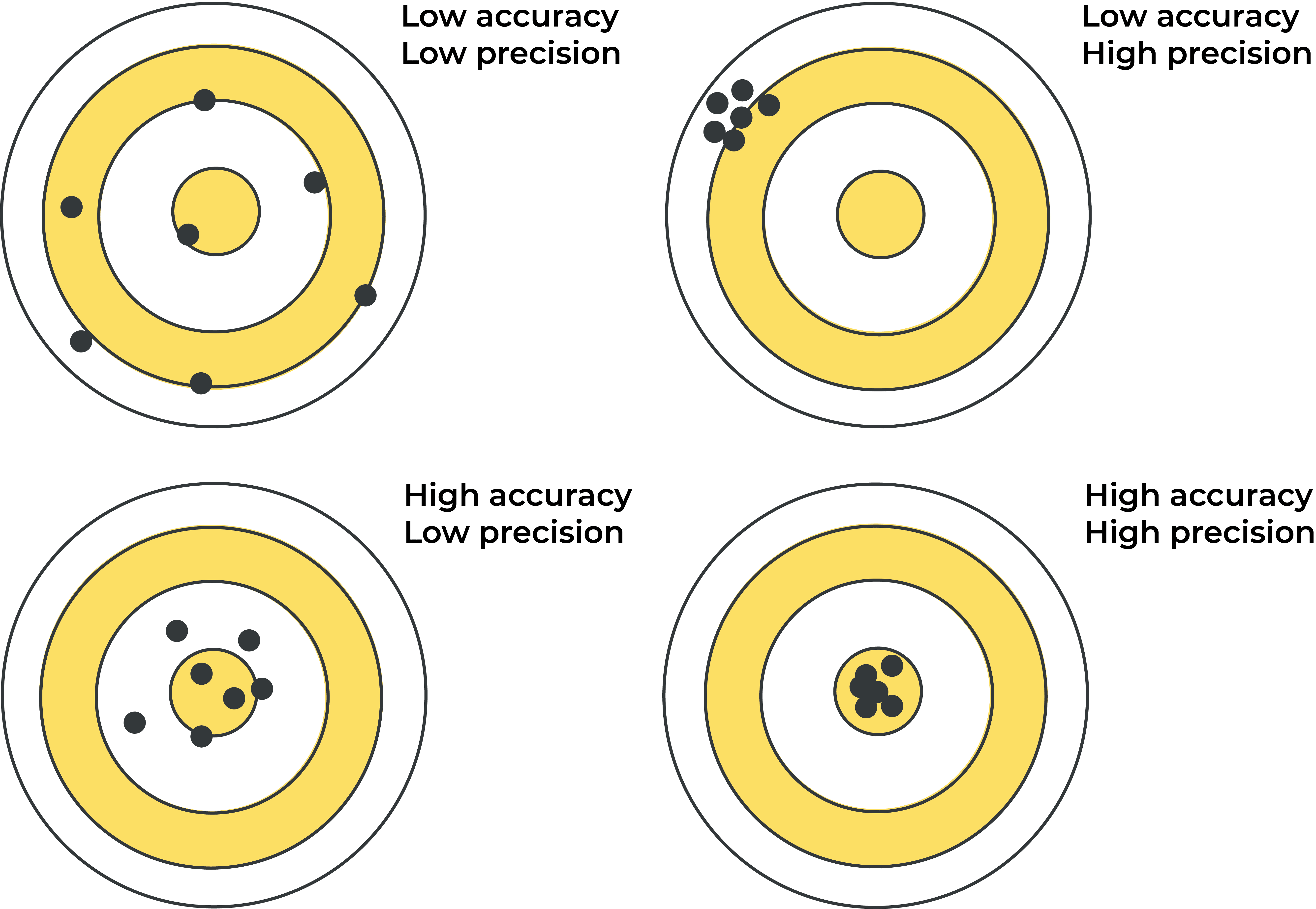
レンジ精度と正確度は、LiDARの主要な仕様であり、しばしば混同されるため、両者を区別することが重要です。
LiDARレンジ精度
精度は、LiDAR仕様の再現性を示す指標です。高い精度は、同じターゲットの繰り返し測定が平均値に非常に近いことを意味し、同様に低い精度は、平均値付近での値のばらつきが大きいことを意味します。
LiDARのレンジ精度の計算方法:
LiDARのレンジ精度を決定するためには、同一のターゲットと環境条件下で複数のレンジ計測を行います。つまり、同一シーンの複数のフレームを記録します。次に、任意の対象物に対する測定レンジ値の平均値を計算し、境界値から減算します。最後に、これらの値の二乗平均平方根(RMS)が計算され、レンジ精度の標準偏差に相当する値が得られます。
レンジ精度は、スピードカメラの読み取りなど、短い時間間隔でのLiDARと移動するターゲットとの距離から車速を計算しなければならないようなアプリケーションでは非常に重要です。
レンジ精度は、センサーとターゲットの距離、ターゲットの特性(反射率や迎角など)に依存します。Blickfeld社のCubeのレンジ精度は2cm未満であることが特徴です。
精度は、LiDAR仕様の再現性を示す指標です。精度が高いということは、繰り返される測定が平均値に近いということです。
LiDARレンジ正確度
正確度は、与えられた測定値が実際の値にどれだけ近いかを定義します。つまり、測定されたターゲット距離とその実際の距離の近さです。レンジが正確なLiDARの場合、距離測定値は実際の距離に非常に近く、指定されたレンジ正確度に非常に近いものとなります。
LiDARのレンジ正確度は、容積測定など絶対距離の測定を含むアプリケーションで有用でしょう。あるいは、ドローンで標高地図を作成する際に使用する場合、その下の地形を特定するために高い正確度が重要になるでしょう。このデータをさらに処理して、作物の3Dモデルを作成し、干ばつや異なる成長段階を監視して水の利用を最適化することができます。
正確度は、ある測定値が実際の値にどれだけ近いかを定義するもので、レンジが正確なLiDARの距離測定値は実際の距離に非常に近いと言えます。
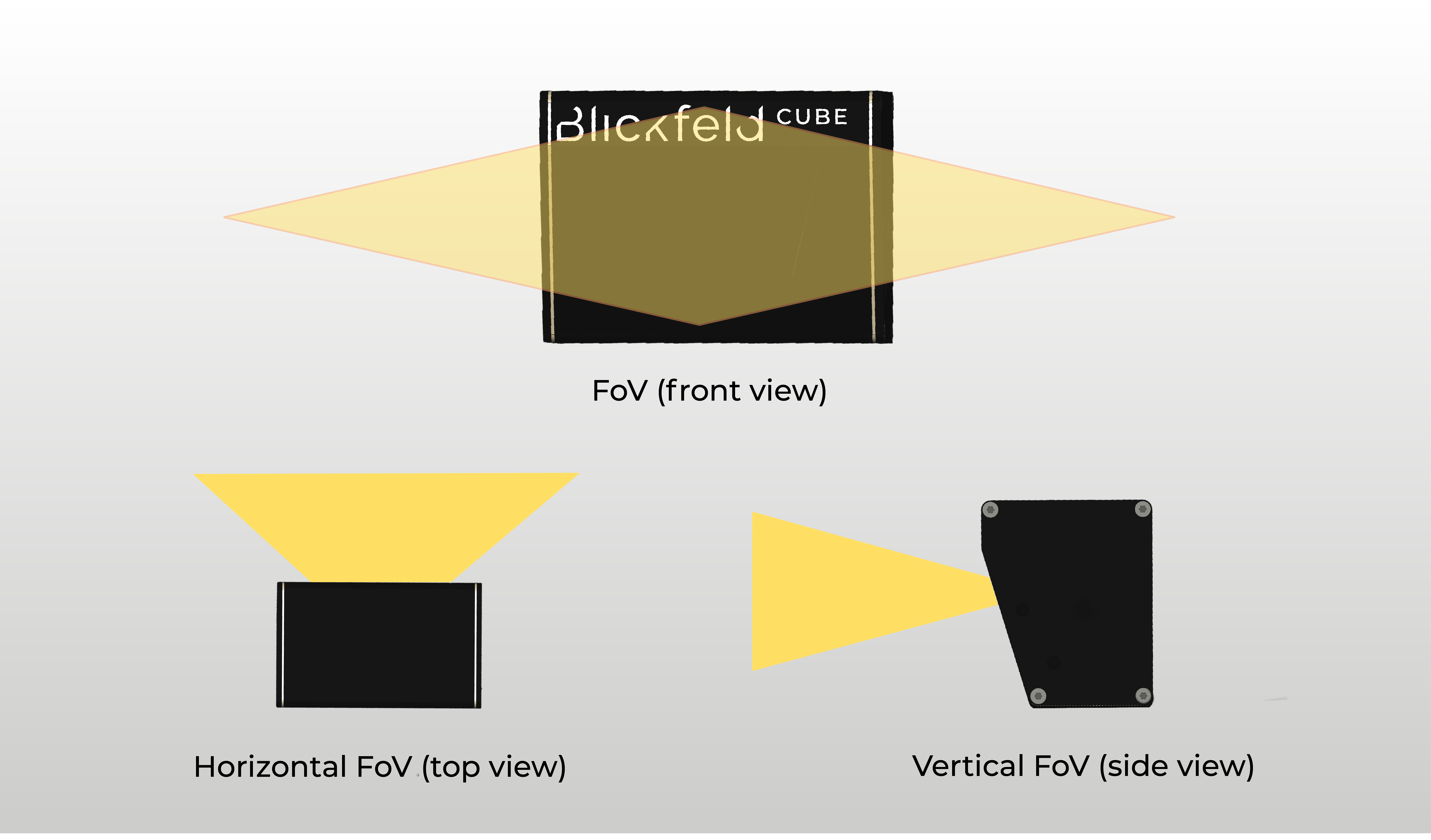
視野角(FoV)
視野角とは、LiDARセンサーがカバーする角度、またはLiDAR信号が放射される角度のことです。それは、LiDAR技術によって大きく異なります。例えば、スピニングLiDARは通常、16~32個のレーザー光源を機械的に回転させることで視野角を生成し、周囲360度の視野を提供することができます。一方、ソリッドステートスキャニングLiDARは、より堅牢でありながら、より複雑でないため、より安価で、レーザーの数が少なく、Blickfeld社の場合は1点のみを照射します。一点一点、視野角を照らすために、ビームは偏向され、つまり「スキャン」されます。
Blickfeld社のLiDARは、視野角を設定する際に非常に高い柔軟性を発揮します。スキャンサイクルごとに放出されるレーザー信号の量が常に同じであると仮定すると、角度、つまり垂直方向の視野角を小さくすると点群の密度が高くなり、垂直方向の視野角を大きくするとLiDARに戻ってくるレーザーはより間隔が広くなります。水平方向の視野角は、同じ視野角を維持したまま点間隔を変更することが可能です。
視野角とは、LiDARの信号が放射される角度のことです。
LiDAR技術によって、視野角は大きく異なります。視野角の要件は、アプリケーションのニーズだけでなく、スキャンする物体の種類やその表面特性など、さまざまな要因によって変化します。
視野角の要件は、アプリケーションのニーズだけでなく、スキャンする物体の種類やその表面特性など、さまざまな要因によって変化します。例えば、森林の樹冠が密集しているところでは、地上からのリターンを得るために広い視野角が必要になります。一方、高いビルや狭い道路がある都市部でのアプリケーションでは、街路からのリターンを得るために狭い角度が好まれます。
スキャンパターン
スキャニングLiDARの仕様の中で、最も重要かつ興味深いのはスキャンパターンです。スキャニングLiDARは、ビーム偏向ユニットまたはスキャナーユニットを持ち、レーザービームをさまざまな方向に偏向させて測距を行い、点群に独自のパターンを作り出します。これらのパターンは、スキャンラインの数や点の密度など、異なる特性を示します。LiDARが使用されるアプリケーションによっては、スキャンパターンの特徴が重要になる場合があります。例えば、人数をカウントするアプリケーションでは、あるエリアに存在する人の数によって、高解像度の点群が重要になる場合があります。必要な解像度を得るためには、多くの走査線が必要となります。
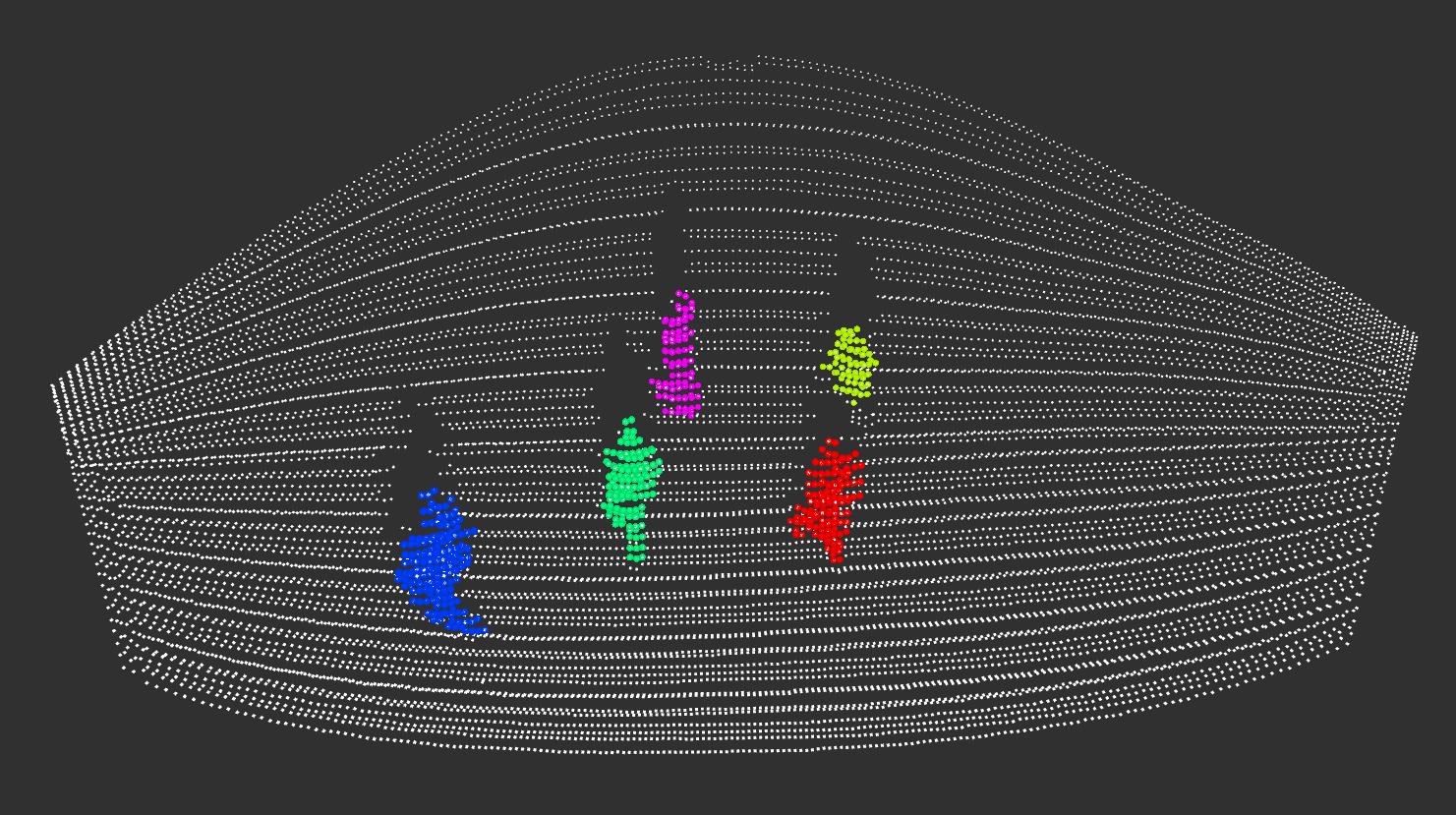
Blickfeld社のセンサーの特徴は、LiDARを使用しながらでも、スキャンパターンを構成するスキャンラインを簡単にカスタマイズできることです。例えば、一般的なビューから高解像度への切り替えも、スキャンラインの密度を変更することでシームレスに行うことができるなど、用途やニーズに応じてセンサーを設定することが可能です。
スキャニングLiDARは、レーザービームをさまざまな方向に偏向させて測距を行い、点群にスキャンパターンと呼ばれる独自のパターンを形成します。このパターンが異なる特性を示すことで、さまざまなアプリケーションに対応することができます。
クロストークイミュニティ
複数のセンサーが同時に現れる多くのリアルタイムアプリケーションでは、クロストークイミュニティも極めて重要なLiDARの仕様の一つです。例えば、自律走行車のLiDARセンサーは、その視野角内にある他の車のLiDARセンサーからのレーザー信号を拾ってしまい、誤検知につながる可能性があります。その結果、例えば道路上の障害物が誤検出され、不要かつ危険な緊急停止を引き起こす可能性があります。また、妨害エコーの強さが十分であれば、LiDARが対象物を見落とす可能性があり、さらに重大な安全上の問題を引き起こす可能性があります。太陽光もまた、ノイズを発生させ、信号の信頼性と検出範囲を低下させるため、大きな課題となっています。クロストークがLiDARセンサーに影響を与えないようにするには、いくつかの方法があります。Blickfeld社ではそのうちの2つを採用しています。
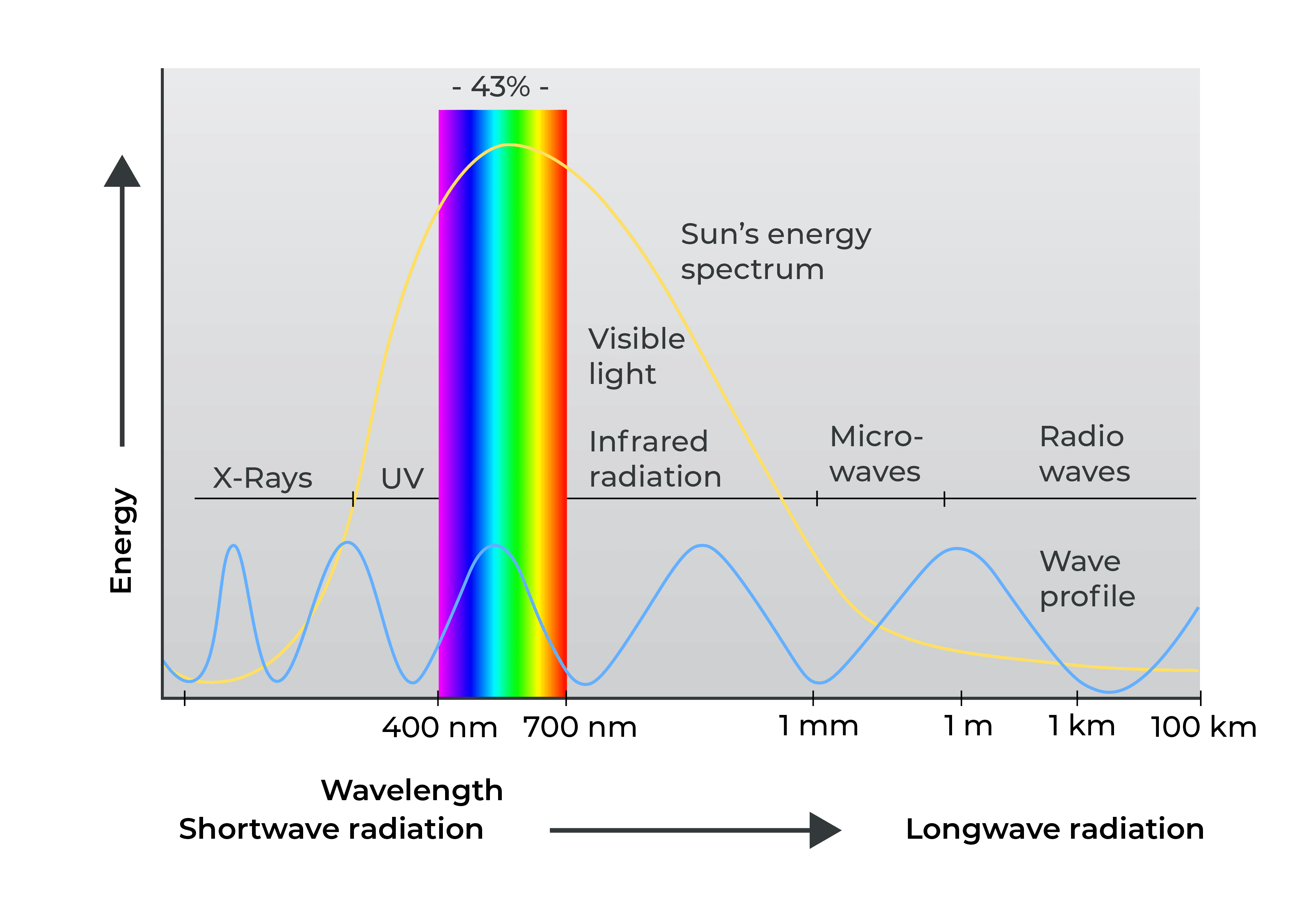
光学フィルタリング
現在のLiDARシステムでは、通常2つのLiDAR波長のうち1つを使用しています。905ナノメートル(nm)と1550nmです。それぞれのLiDARの波長には長所と短所があり、どちらかを選択する前に検討する必要があります。Blickfeld Cubeのような多くのLiDARは、905nmの波長で動作しています。これは電磁波スペクトルの赤外線領域に近いものです。また、検出器の前にフィルターがあり、波長の近い電磁波だけを通過させ、他の電磁波は遮断します。そのため、1550nmなど異なる波長のLiDARのレーザーには反応しないようになっています。しかし、905nmで動作する別のレーザーからの信号には、まだ騙されやすいという欠点があります。そこで、空間フィルタリングと呼ばれる手法が採用されています。
空間フィルタリング
Blickfeld Cubeは同軸設定のため、レーザーの反射をビーム偏向ユニットを通して発光と同じ経路で受け取ることができます。これにより、検出器は特定の方向に送られた光子のみを捕らえ、異なる方向から来る他の光子に対しては「盲目」となります。つまり、自律走行車に搭載された別のLiDARセンサーが、同じ角度で反対方向にレーザーパルスを送信し、Cubeがそれを検知して偽のエコーを発生させるためには、適切な時間帯でなければなりません。この可能性は、LiDAR間の距離、スキャン速度、ビーム発散角、相対的な方向などの要因に依存するため、誤検出の可能性は極めて低くなります。
また、分光フィルタリングや空間フィルタリングにより、太陽光によるノイズを低減し、LiDARセンサーにとって重大な課題であるレンジ性能への影響を最小化することができます。Cubeの検出範囲は、逆光100kluxの基準値で測定しています。
クロストークとは、複数のセンサーが発する信号を、送信元ではないLiDARが受信してしまうことで、誤ったエコーを検知してしまうことです。クロストークは、光学フィルタリングや空間フィルタリングなどの対策により、最小限に抑えることができます。
検出率
検出率(DR)または真陽性率(TPR)は、実際のターゲット上の選択された点が検出されたフレームの割合です。逆に、誤検出率(FPR)は、実際の物理的なターゲットがないにもかかわらず、点群内のエコーが検出されたフレームの割合を測定します。誤検出は、点群の正確度を低下させ、物体認識の信頼性を低下させるため、好ましくありません。上記の侵入防止の例では、LiDARの検出率が低いと、監視アプリケーションで誤報が増加し、結果の信頼性が低くなります。
Blickfeld Cubeは、90%の検出率を誇り、誤検出率は0.2%未満です。そのため、結果の信頼性と一貫性が最も重要視されるアプリケーションで非常に有用です。
検出率(DR)または真陽性率(TPR)は、実際のターゲット上の選択された点が検出されたフレームの割合です。誤検出は、点群の正確度を低下させ、物体認識の信頼性を低下させるため、好ましくありません。
マルチリターン
LiDARは通常、ビームを発射した後、距離が長くなるにつれてビームが広がったり、発散したりするため、複数の反射を受け取ります。そのため、ビームの一部が最も近いターゲットに当たる一方で、その一部がより遠くに位置するターゲットに当たることもあります。つまり、ビームが戻ってくるタイミングが異なるため、複数のリターンが登録されることになります。
もし、LiDARが1つのリターンしか解析できなければ、アルゴリズムか反射の強度で定義された1つのターゲットしか表示されないでしょう。通常、センサーに最も近いターゲットだけが記録され、後ろのターゲットは検出されないままとなります。
マルチリターンに対応したLiDARは、物体によって部分的に遮られたターゲットも情報として検出することができます。これにより、同じレーザーパルス数で収集できるデータの量と深さを増やすことができます。
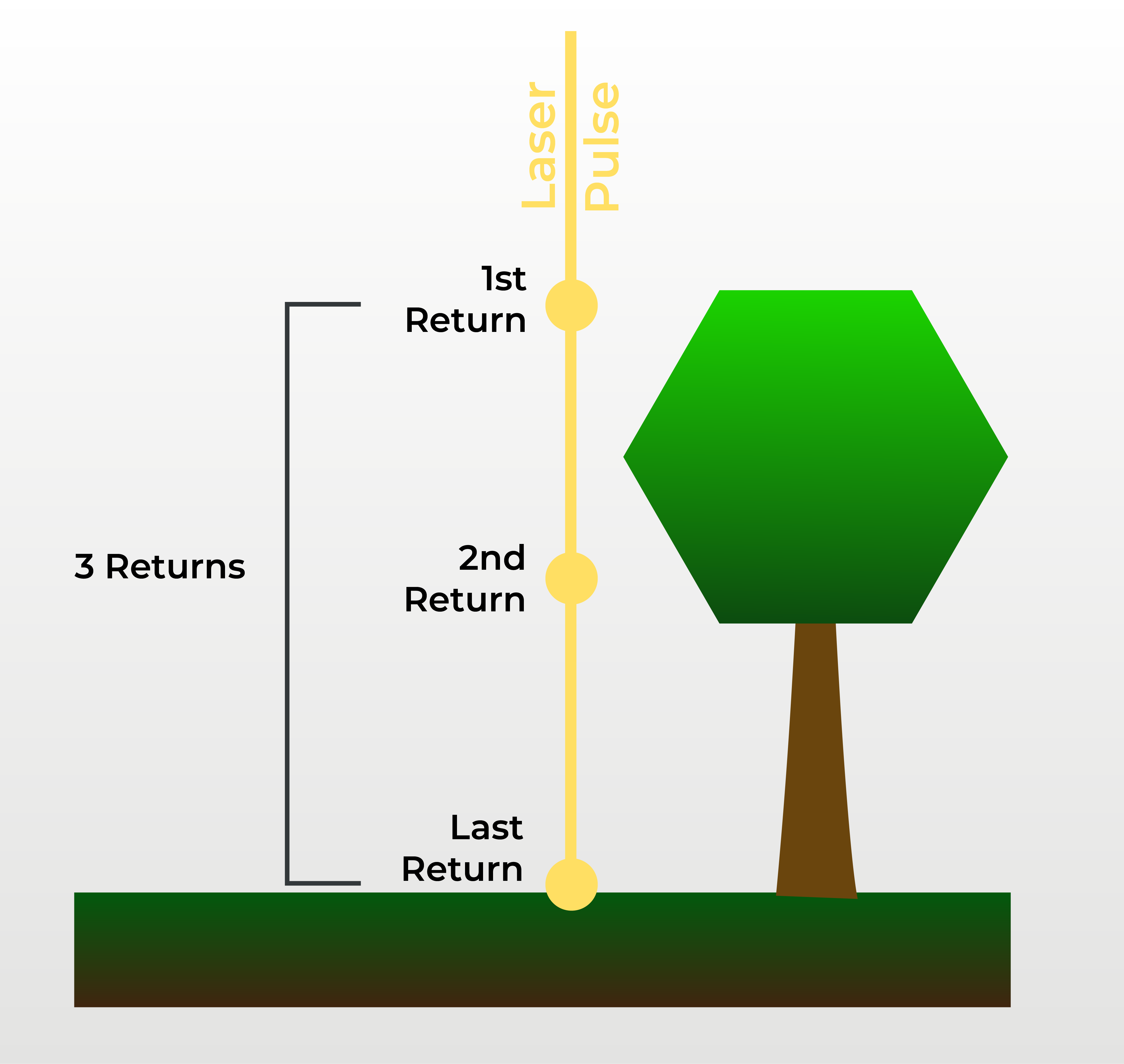
例えば、上空から森林の葉っぱを検出する場合、最初のリターンは梢からの反射光です。同じレーザー光が途中の枝に当たって反射したり、別のレーザー光の一部が地面に当たって戻ってきたりすることがあります。その結果、複数の光が返ってきて、LiDARは3つの異なる距離を記録する可能性があります。このシナリオでは、通常、最初のものが風景の中で最も高い特徴である梢を検出するため、最も重要なリターンになります。
Blickfeld社のCube は、発射されたレーザーパルスから最大3つのリターンをサポートし、リターンデータの数を選択するオプションが用意されています。アプリケーションの要件に応じてリターン数を設定することができるため、Cubeはさまざまなユースケースに対応することができます。
LiDARから送信されたビームは、通常、距離が長くなるにつれて広がりまたは発散し、異なるターゲットに当たる可能性があるため、結果として異なるインスタンスで複数のリターンが発生することになります。このような多重反射を処理できるLiDARは、部分的に遮蔽されたターゲットを検出することができ、収集するデータの量と深さを増加させることができます。
LiDARセンサーは、技術革命の最前線にあり、多くのアプリケーションを可能にします。LiDARセンサーは、様々な形状やサイズ、そして最も重要なことは、異なるテクノロジーをベースにしていることです。そのため、さまざまな仕様を理解することは、特定のアプリケーションに適したセンサーを選択する上で極めて重要です。