Last updated on 15-Oct-2021
交通渋滞:現代の困りごと
ミュンヘンのミトラリングをラッシュアワーに走ったことがある人なら、世界中の都市空間が直面している大きな問題である、見渡す限りの交通渋滞について知っていることでしょう。ドイツ人は平均して年間46時間、ミュンヘンでは2019年に87時間もの間、渋滞に巻き込まれていたのです。これは、毎年1人当たり3日半以上の日数です。
個人にとって、こうした時間のロスは迷惑であり、生活の質を損ねるものです。しかし、国にとっては、この数字はかなりの経済効果を意味します。交通渋滞によって、従業員は生産性を上げることなく拘束され、商品は棚に並べられることなく道路に置かれるため、年間数十億ユーロのコストがかかっています。また、燃料消費量の増加やCO2排出量の増加により、環境汚染も深刻化しています。
交通渋滞の原因とは?
交通渋滞はどのように発生するのでしょうか?渋滞は、道路工事や事故、同一ルートでの交通量の過多、多数の歩行者の滞留など、複数の要因によって分散的に発生する問題です。これらの要因はある程度軽減することができますが、予測や管理が非常に難しいのが、道路を走るドライバーの行動です。
すべての道路利用者は、自分にとって最適な方法で自動車を運転します。例えば、前の車に追いついたり、車線を変更したりと、目的地により早く着くために最適と思われる行動をとります。しかし、個々の道路利用者は、自分が周囲の交通にどのような影響を与えているかを見ることができないため、その要因を考慮することはできません。ドライバーは、交通状況を予測する能力がないため、停止している車の3キロメートル後方で渋滞が発生することを正確に予測・計算することができません。
そのため、交通計画を立てる際には、個人の行動とバランスを取りながら、交通の流れを最適化する必要があります。その解決策は、先制的かつ分散的に、つまり先回りして、個々の道路利用者を超えた形で交通を規制することであります。そのためには、交通状況を完全に把握することが必要です。
この課題は、スマートな環境で動作するスマート車両で対応することができ、これがスマートインフラストラクチャーの概念につながります。

スマートインフラとは?
スマートインフラとは、既存の道路インフラにGPSやカメラ、センサーなどのテクノロジーを搭載し、常時交通状況を監視してデータを収集するという概念を表しています。モニタリングによって収集されたデータやフィードバックによって、都市の課題に関する意思決定を容易にするシステムです。このデータを活用することで、交通の流れやダイヤをダイナミックに変化させることができます。
GPS、カメラ、センサーで全容を把握
スマートインフラを実現し、交通渋滞を解決するためには、いくつかのテクノロジーを組み合わせてソリューションを見つけることができます。中には、他のものよりも優れたソリューションが存在します。
GPS:
GPSは、道路利用者の動きを追跡することで、貴重なデータを提供します。そのため、渋滞情報などの信頼性の高い情報提供が可能です。しかし、歩行者や自転車を考慮することは、GPSの能力を超えています。
GPSのように道路利用者の協力を得て情報を収集するのではなく、センサーやカメラをインフラに組み込んで交通状況を把握することができます。そのためには、信号機や街灯、交通標識などにデバイスを設置し、そこから周囲の情報を収集することが必要です。
カメラ:
例えばカメラは、カラーで記録することができますが、暗闇や悪天候の中で使用すると、同じ品質の画像を提供することはできません。また、物体の検出や距離の測定には3Dデータが必要ですが、2Dのデータしか取れません。また、プライバシー保護の観点からも、最適な選択肢とは言えません。
レーダー:
レーダーは主に速度監視に使用されますが、交通監視にも使用することができます。しかし、レーダーは解像度が低いため、非常に粗い画像しか得られません。このテクノロジーは物体を識別することはできますが、それらを分類することはできません。例えば、レーダーは歩行者と自転車の区別がつきません。
異なるタイプのセンサーの比較について、より詳しいブログはこちらでご覧いただけます。
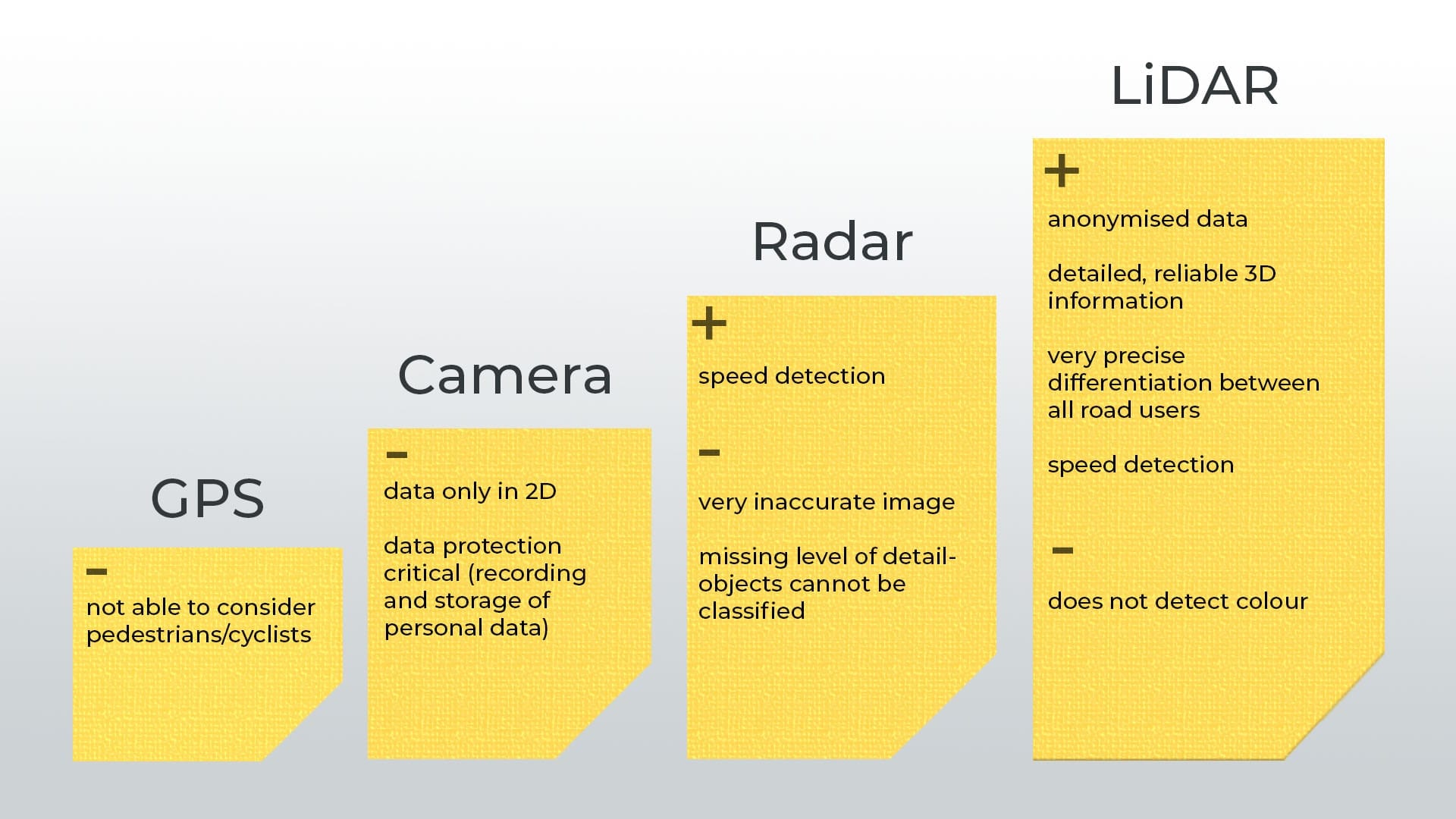
LiDAR: 道路利用者を正確に、匿名で捉える
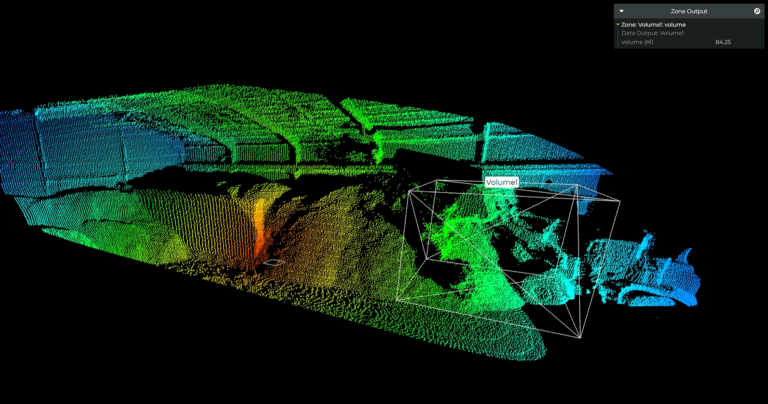
レーザーベースのLiDARテクノロジーは、詳細かつ信頼性の高い3D情報を提供し、異なる道路利用者を容易に区別することができます。また、3D点群を使って対象物を歩行者、自動車、自転車などに分類することは可能ですが、個人を特定することはできないため、道路利用者のプライバシーを保護することができます。
また、LiDARセンサーは、天候や照明が難しい環境下でも確実に情報を収集することができます。暗闇やほこり、霧などでも問題ありません。さらに、位置や物体の分類・情報から速度を記録することで、交通の流れや渋滞の原因を分析することも可能です。
さらにLiDARは、交通量予測のための高精細な都市地図の作成や、代替路線の提案にも役立ちます。これらのデータをもとに、道路信号をスマートに管理し、タイムリーな交通情報を提供することで、渋滞の解消だけでなく、自動車からの排ガスを大幅に削減することができます。
スマートインフラからの交通情報により、実用的な対策が可能に
インフラに設置されたLiDARセンサーは、リアルタイムの交通状況についての情報を提供します。交通量は多いのか少ないのか?事故や工事現場があるのか?信号や横断歩道には歩行者が多いか?
これらの情報をもとに、リアルタイムで交通状況に応じた以下のような対策を行い、交通の流れを最適化することができます。
- スマート信号機の導入
- 制限速度の調整
- 渋滞警告の表示
- 進路変更勧告の表示
- 危険個所の特定と再構築

再び人を中心とした都市へ
多くの都市で、「クルマにやさしい都市」というパラダイムの影響が今もはっきりと見て取れます。
都市計画は、車による交通の流れを妨げないという目標に沿うものです。
このモデルは数十年前から強い批判にさらされているが、都市の交通コンセプトの多くは、依然として自動車による個人輸送を指向しています。
近年、このような考え方を改め、カーフリーゾーンやシティセンターを持つ人間中心の都市を求める声が高まっています。住民、通勤者、その他すべての道路利用者のニーズが最優先されなければならない、つまり、移動をできるだけ安全かつ簡単にすることが必要です。
道路計画と交通管理は、自動車だけでなく、他の移動手段も含めて再考されなければなりません。そのためには、歩行者の横断歩道をより安全にする、転倒事故を減らす、自転車専用道路を作る、バスレーンを作るなどの対策が必要です。そして、センサーを使ったスマートインフラと組み合わせることで、交通渋滞の悩みを解消することができるのです。