
スキャニング、スピニング、フラッシュなど、すべてのLiDARセンサーに共通するのは、光の力を借りて環境を検知することです。しかし、その点以降は、反射光を利用して距離を測定する原理さえもテクノロジーによって異なるほど、類似はしなくなります。よく知られているのは、タイム・オブ・フライト測定(ToF)と周波数変調連続波(FMCW)の2つの原理です。
タイム・オブ・フライト:レーザーパルスを用いた距離測定
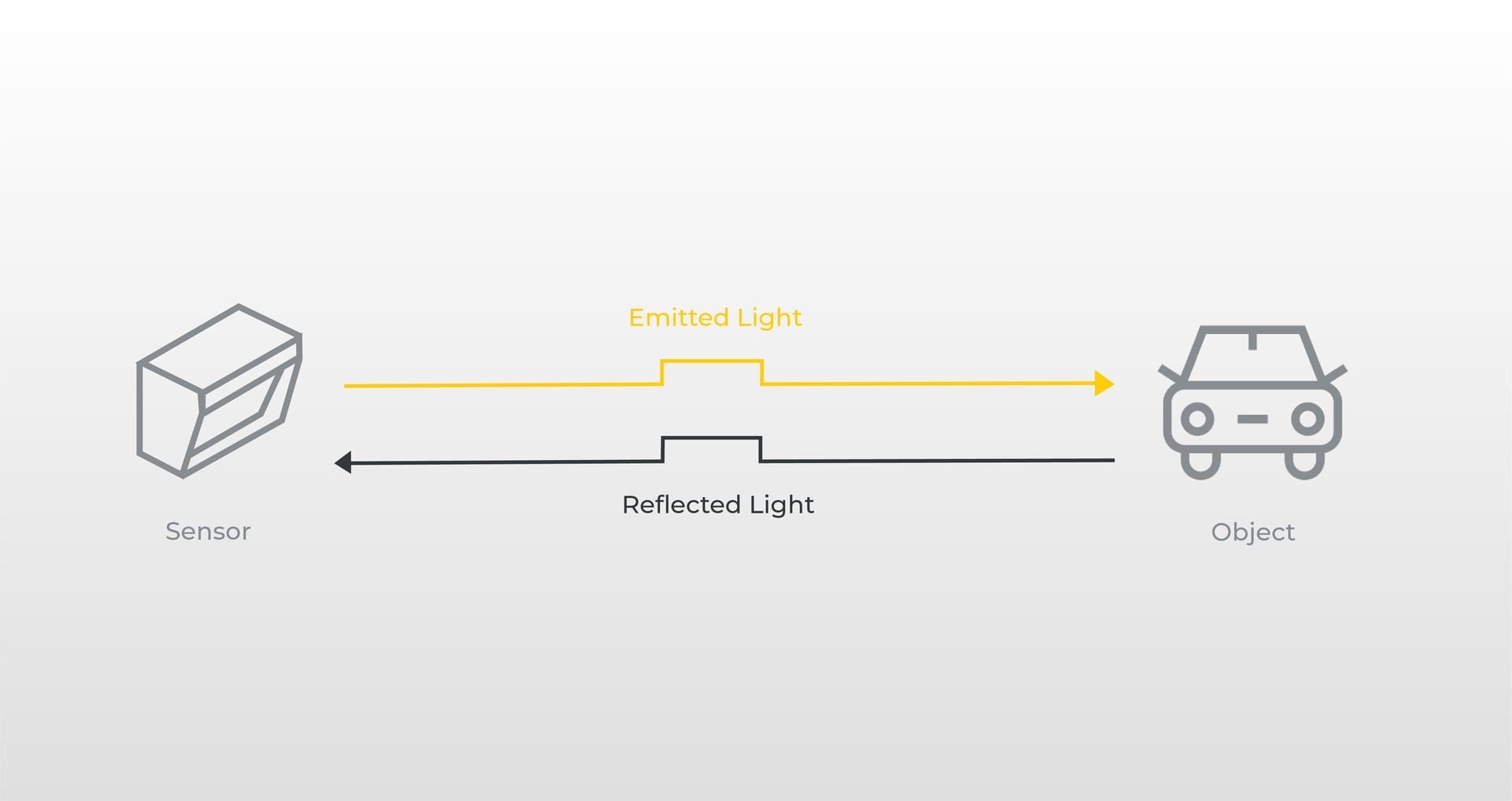
タイム・オブ・フライト測定は、レーザーパルスを照射することで物体までの距離を計測します。レーザーパルスとは、複数の平行光パルスを短い時間間隔で次々と発射することです。これらが物体で反射され、再び検出器に拾われます。レーザーパルスの発光、反射、再捕捉にかかる時間と光速を利用して、反射物までの距離を計算します。
この原理は、最も一般的な測定方法です。データの信頼性が高く、安価なレーザー光源で実現できるのが特徴です。しかし、ToFにもいくつかの制約があります。例えば、レーザーパルスを照射するためには、光を最大限にコリメートすることで、より高い飛距離を実現します。しかし、この平行度の高いレーザー光を照射できるパワーは、目の安全のために厳しく制限されています。この問題を解決する方法もあります。例えば、LiDARセンサーをインテリジェントに設計し、Blickfeld社のCubeで使われているような特に大きなMEMSミラーを使えば、タイム・オブ・フライト法でも長い距離を実現することができます。それゆえ、多くのセンサーでは、今でもこの方式が好ましい測定方法となっています。
パルスの代替:周波数変調
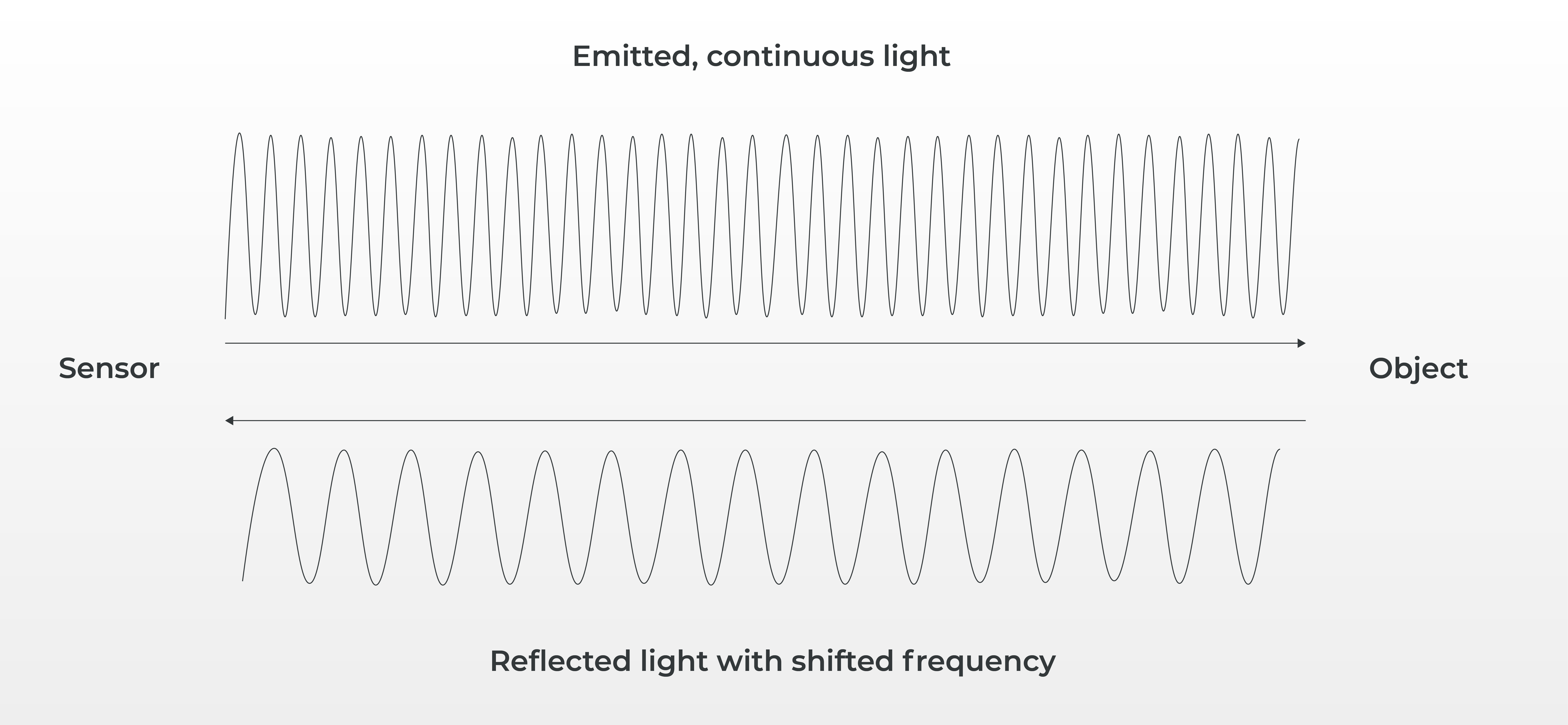
レーザー出力のピークが高いパルスを避けるために、連続したレーザービームを放射する方法もあります。ここでは、周波数変調を利用して、物体までの距離を測定します。周波数変調とはどういうことでしょうか?照射されたレーザー光は、変調されて「チャープ」され、信号の周波数が何度も変化します。このとき、レーザー光は物体に当たって反射します。この反射により、発光時の周波数と比較して、光の周波数が影響を受けます。反射した光が検出器に戻ると、発光した光と混ざり合い、その周波数の差が測定されます。この2つの周波数の差を表す、いわゆる中間周波数は距離に比例するため、物体の位置に関する情報を得ることができます。この物体がセンサーに向かって移動する場合、ドップラー効果により、FMCW方式で物体の速度を直接求めることができます。
自律走行に必要な速度の直接計測
タイム・オブ・フライト法では、対向する物体の速度も測定できますが、FMCWのように直接測定することはできません。ToFは記録されたデータ点からセンサーと物体間の距離を測定することしかできないため、物体の速度は複数の測定値から算出する必要があります。そこで、個々の測定における物体とセンサー間の距離の変化とパルス周波数から、複数のパルスを発することで速度を算出することができます。
コヒーレントディテクターと同軸センサー設計の比較
周波数変調のようにコヒーレントに光を放射する場合、当然ながら連続的に検出することも必要です。そのため、FMCWではコヒーレントディテクターを使用します。コヒーレントディテクターは、特に放出されたコヒーレント光のみをフィルタリングして記録する必要があるため、非常に感度が高いのです。また、感度が高いということは、不要な光の影響を受けにくいということでもあり、FMCWが良好なSN比を示す理由でもあります。そのため、反射の弱い物体でも、より遠くから検出することができます。ただし、タイム・オブ・フライト測定が劣っているわけではありません。インテリジェントLiDARセンサーの設計でも同様の効果が得られます。同軸設計により、出射光と正確に同じ角度で検出器に当たった光だけを再び捕らえることができるのです。このようにして、太陽光や他のLiDARセンサーからの信号がフィルタリングされるのです。
より確立された測定原理であるタイム・オブ・フライト方式
では、周波数変調の方が優れた測定原理なのでしょうか?これは一概に言えません。どちらの方式にも長所と短所があります。しかし、FMCWに対するタイム・オブ・フライト法の大きな利点は、その開発の成熟度です。ToFはLiDARセンサーで何年も前から成功裏に使用されていますが、FMCWはまだ初期段階にあります。また、レーザー光源にToFよりも特殊な要件が課されるため、技術が複雑であり、現状ではまだ非常にコストが高くなっています。特に、LiDARセンサー の場合、車載用センサーとしてすでに強い価格圧力がかかっているため、産業化の問題は重要な課題となっています。そのため、FMCWモジュールは、現在のToF用レーザー検出モジュールの価格よりはるかに安くなる必要があります。しかし、開発が進めば、FMCWを1チップに集積することが可能になり、長期的には非常に魅力的です。結局のところ、サイズというのは、すべてのLiDARメーカーが価格に加えて削減しようとしているものなのです。