
LiDARテクノロジーの発展は、全く新しいユースケースの世界を切り開きました。匿名化された距離情報をセンチメートルレベルの正確度で点群として収集できるようになったことは、エキサイティングなことです。LiDARは通常、環境をキャプチャして、データ処理ステップの前にシーン全体の点群を出力します。この点群は、多くのアプリケーションで非常に有用ですが、大量のデータの転送、保存、分析に多くのリソースを必要とするため、技術的な課題もあります。
オンデバイス動体検知
Blickfeld社は、BlickfeldスマートLiDARの動き検出アプリケーションを可能にするオンデバイス・プリプロセッシング・アルゴリズムを導入することで、この問題に対処しています。これは、LiDARに統合された高性能システムオンチップ(SoC)を使用して、デバイス自体の静的背景を減算することで実現されます。この新機能により、処理パイプラインの早い段階で洞察に満ちた情報、特に動的な動きの検出を抽出し、それぞれのアプリケーションですぐに分析・使用できるように処理前の点群データを生成することができます。
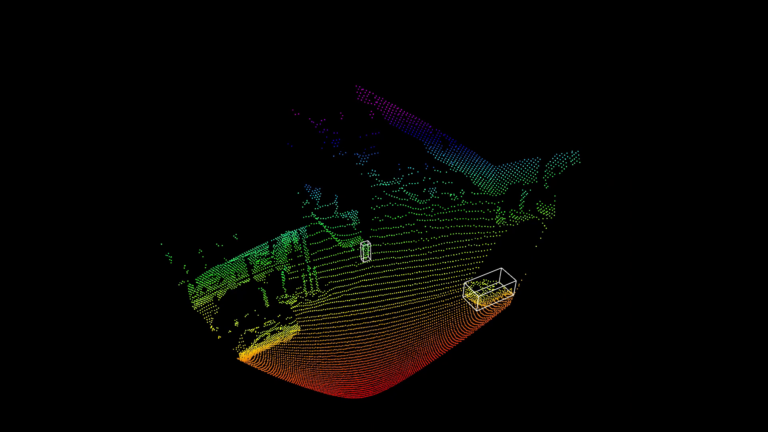
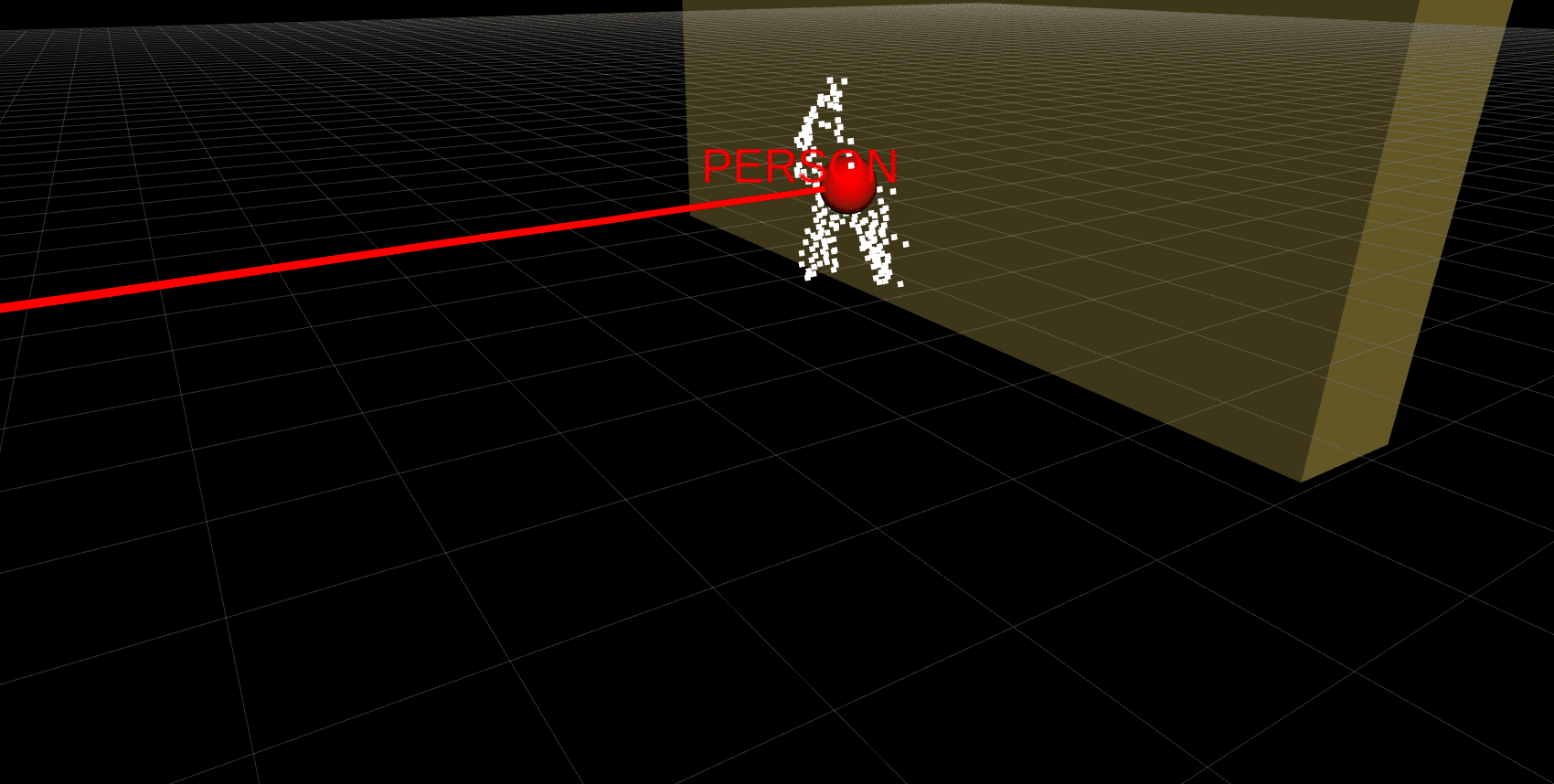
シーン内の活動量にもよりますが、一般的にこのアルゴリズムは、特にシーンがほとんど静止している場合に、送信するデータ量の劇的な減少につながります。この例では、データポイントの総数が8,800以上からたったの163に減少し、メモリと送信時間が線形的に減少したため、送信するデータが98%以上減少しました。
これにより、LiDARセンサーは、さまざまな環境下で移動する物体の記録、追跡、分析を行うアプリケーションでの運用が可能になります。この機能は、道路、駅、空港などの交通機関や公共の場におけるインテリジェントな視覚監視・追跡システム、および多くのセキュリティアプリケーションで非常に有効です。
バックグラウンド減算法の原理
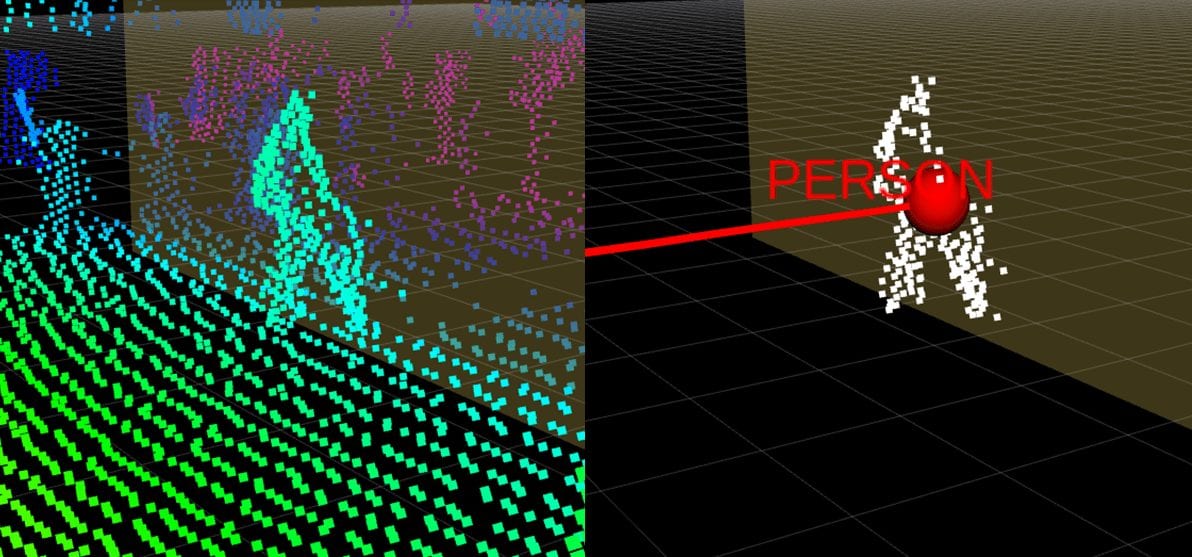
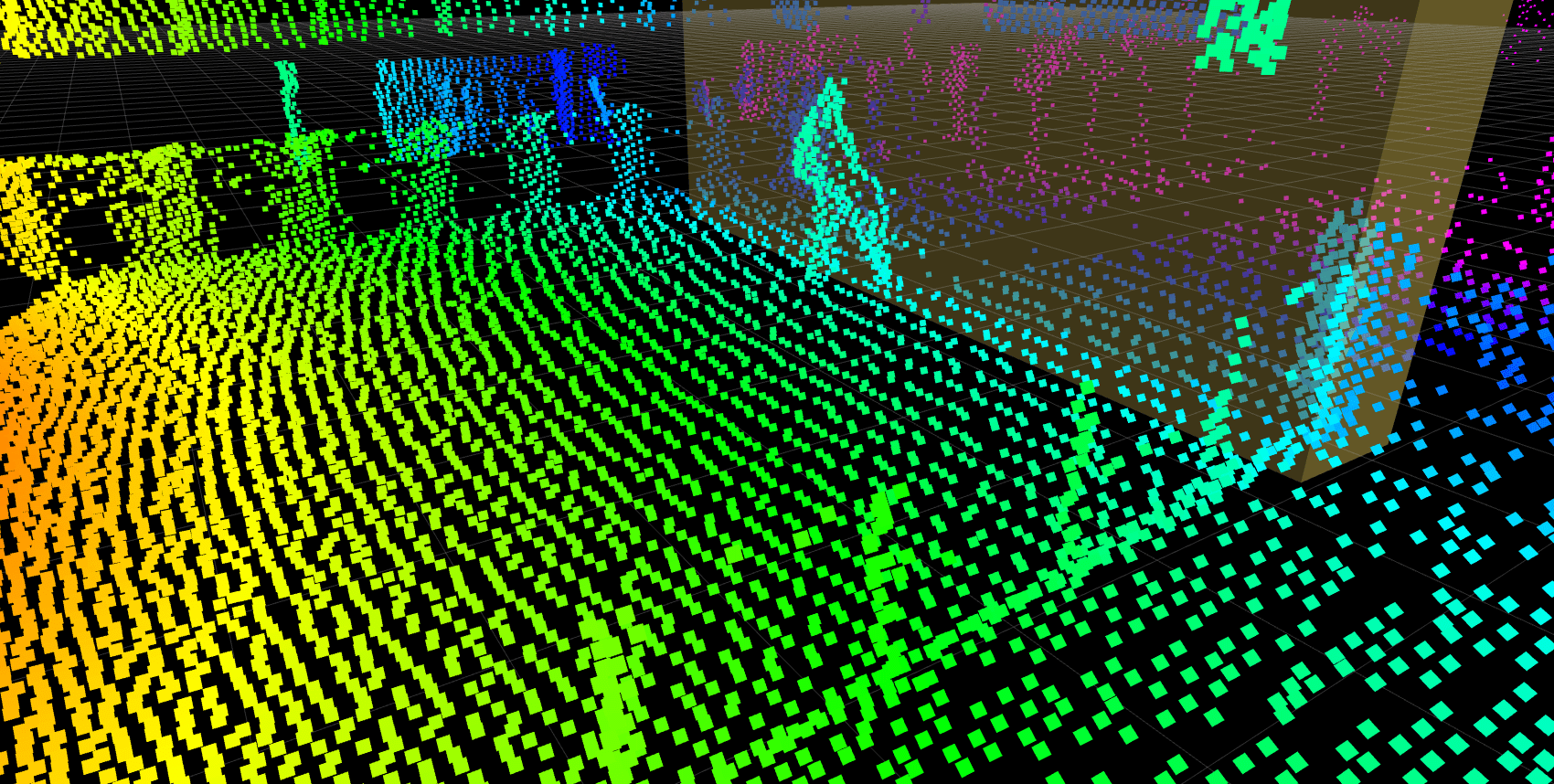
デバイス上での動き検出を可能にするバックグラウンド減算アルゴリズムは、設定可能な数の参照フレームを使用して、シーン内の静的な点(背景)を推定します。参照フレームが処理されると、背景モデルとアクティブフレームを比較することにより、点群からすべての静的ポイントを削除し、非静的ポイント(前景)を取得します。
アクティブフレーム内の点のうち、背景から大きく外れた点を移動体と見なします。これらの「前景」ポイントは、物体のローカライズとトラッキング、および様々なユースケースのためのデバイス上の動き検出の両方について、さらに処理されます。
バックグラウンド減算アルゴリズムを用いたデバイス上の動き検出機能は、以下のようなアプリケーションに大きな効果を発揮します。
人物カウントのためのオンデバイス動体検知機能
人数のカウントは、空港、小売店、大学、銀行、レクリエーション施設など、基本的にインテリジェントな顧客と業務上の洞察が必要とされるあらゆる場所で、さまざまな環境で役に立ちます。
特定のゾーンを通過する人の数を計算することは、オペレーションを改善し、リソースの利用を最適化するために不可欠となりえます。例えば、以下のユースケースでは、スーパーマーケットの入口にLiDARセンサーを設置し、周囲の3Dビジョンを作成し、全視野角のデータポイントを取得することができます。
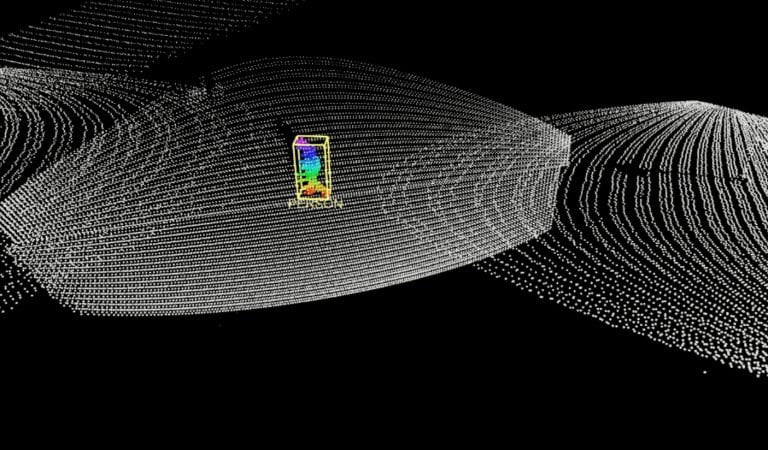
来店した人の総数をカウントするゾーンを作ることができます。このような自動追跡を行うことで、たとえば、さまざまな営業時間帯で必要な人員を正確に計算し、営業コストを削減するのに役立ちます。しかし、生成されるデータフィードには、ドアやカウンター、食料品の棚など、多くの静的なオブジェクトも含まれます。そこで、バックグラウンド減算アルゴリズムを用いて、人物とゾーンを含むデータのみを転送することで、ネットワークリソースの負荷を劇的に低減します。
正確には、この場合、バックグラウンド減算前の総データ量はセンサーあたり〜3MB/sであったものが、センサーあたり〜0.2MB/sに削減されました。さらに、前景からの点のクラスタリングによる前処理を行うことで、実用的な洞察を生み出し、点群は、データストリームがセンサーあたり〜0.01MB/sに削減され、転送する総データ量のほぼ99%削減につながりつつも、人物であると特定されます。
交通監視のためのオンデバイス動体検知
LiDARベースの交通監視システムは、リアルタイムかつ匿名化された3Dデータを提供するため、非常に有望です。このことは、例えば、混雑した交通状況において、歩行者か自転車かを区別することはできても、個人を特定することはできないため、道路利用者のプライバシーを保護することができることを意味します。よりニュアンスの異なるアプリケーション、例えば異なる道路利用者の移動データを取得したり、車線ごとの平均速度、車線ごとの車両数、車両の滞留時間、人の数、歩行者の平均速度などの指標はすべて、交通監視システム用のLiDARを使って算出することが可能です。しかし、交通監視は瞬時に膨大なデータを生成するものでもあり、計算負荷を軽減するスマートなソリューションが急務であることを意味しています。
私たちのスマートLiDARを使用して監視された典型的な交通ジャンクションを分析してみましょう。
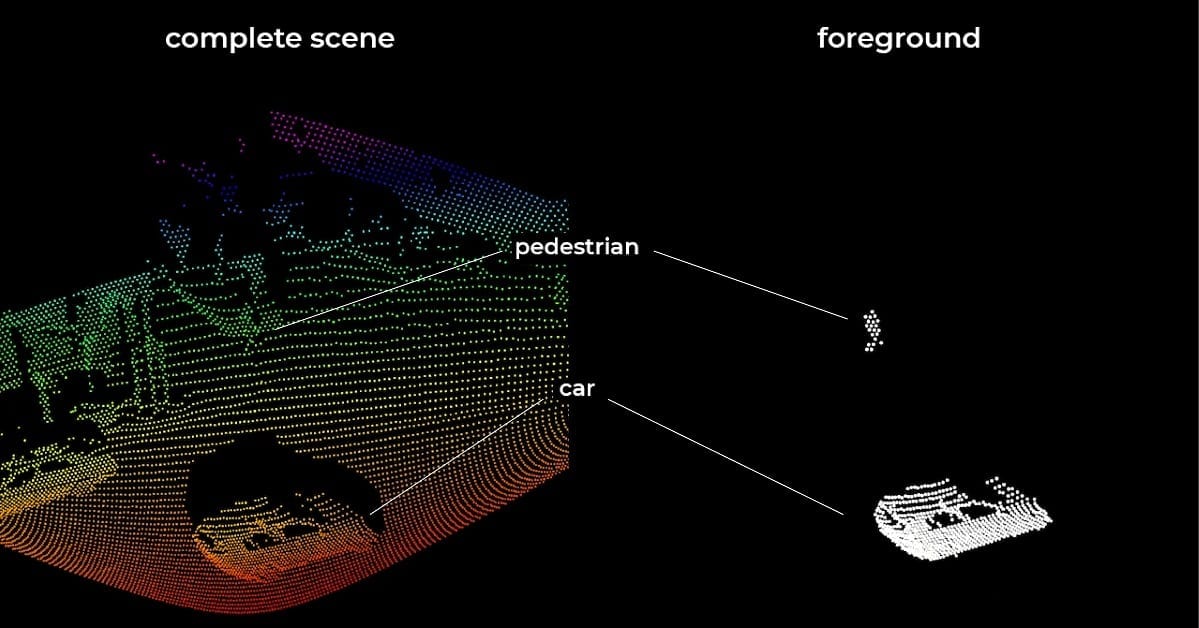
点群には、交差点に進入する車両や歩行者だけでなく、舗装や道路、建物など、シーン周辺にある静的な物体も「完全なシーン」として見ることができます。
しかし、スマートLiDARのデバイス上のデータ解析機能は、背景から静的オブジェクトを識別して除去し、その結果、歩行者や移動する車などの前景の動的オブジェクトだけが「前景」としてラベル付けされることになるのです。
このステップにより、処理するデータ量を大幅に削減できるため、物体識別の正確度と速度を向上させるとともに、データ転送時のネットワークへの負荷を軽減することができます。
進化するLiDAR技術
LiDARは、最も有望なセンサーベース技術の一つとして台頭してきており、ピンポイントの正確度で空間認識機能を提供することで、スマートアプリケーションの未来を決定づけます。Blickfeld社のスマートLiDARは、プリプロセッシング・アルゴリズムを使用して点群から実用的な洞察を迅速かつ簡略化して抽出することにより、それを次のレベルへと引き上げました。
動的動体検知アルゴリズムに始まり、デバイス上のバックグラウンド減算は、すでに多くのプロジェクトでその価値を証明しています。
また、プリプロセッシング・アルゴリズム・ライブラリの拡張により、環境やユースケースをより複雑に解釈する多くの機会が開かれ、すべてのユーザーにとってLiDARセンサーの利用しやすさと有用性が高まります。