
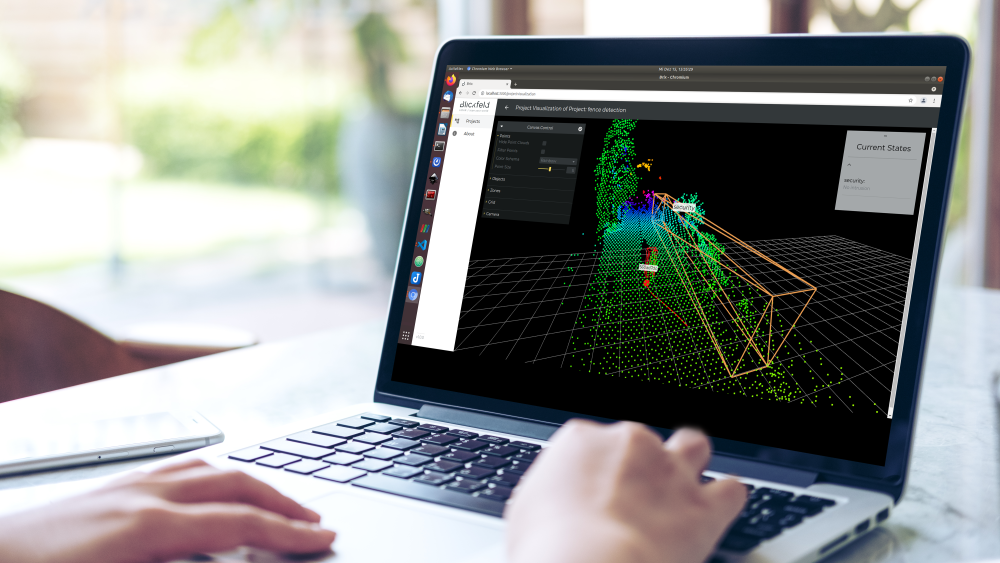
LiDARデータは「点群」として表示されますが、これは魅力的な表現です。これは、センサーが捉えた環境の正確な3D画像です。その3次元的な特徴から、非常に多様な視点が可能となり、様々な角度からその光景を眺めることができます。
しかし、ユーザーがLiDARセンサーを使うのは、美しい画像が好きだからではありません。データは、人物分析から体積計測、セキュリティまで、数え切れないほどのアプリケーションを可能にする豊富な情報を届けます。人はきれいな点群から必要な情報を一目見ただけでは見出せないが、アルゴリズムがそれをうまく解釈してくれるのです。
この記事シリーズのパート1では、物体がどのように検出され、追跡されるのかを説明します。
w
Blickfeld Percept
一般的に生のLiDARデータを扱うには、ユーザーは3Dデータの扱い方を知っておく必要があります。しかし、全員それが出来るわけではないので、Blickfeldでは、LiDARで生成されたデータから実用的な情報を抽出するためのソフトウェア製品を開発しました。Blickfeld Perceptはシンプルで直感的に使用でき、群集分析、セキュリティ、体積計測の分野でのアプリケーションが可能です。
w
物体検出とトラッキングを使用した歩行経路の記録
ストリートフェスタが開催されているマーケット広場を想像してみてください。様々なブースが作られ、製品、食べ物、飲み物が売られています。主催者は、来場者がどのように広場内を移動しているかを知りたいと考えます。この情報をもとに、どの位置が販売ブースに適していたのか、どの商品が特に人気があるのかを評価することができるのです。このような情報は、ブースの運営者にとっては、ブースの外観がどの程度魅力的か、それを最適化する必要があるかという判断材料になります。また、主催者側にとっても、来場者数に応じてどのブースにどのような価格を設定すればよいかの判断材料になります。
背景と前景を区別し、データ転送量を削減
フェスティバルの来場者の動きを記録するためには、来場者を点群として検出する必要があります。点群自体は、スキャンした環境全体を3次元の点として構成しているため、オブジェクトとそれ以外を区別する必要があります。まず、来場者はもちろん、車や銀行、ベビーカー、犬など、あらゆるものを対象としています。
この例で検出するオブジェクトは、マーケット広場を動き回る人であるため、すべての移動点を検出することで他と区別します。これは物体検出には必須ではないことですが、転送するデータ量を減らすことができるため、多くの場合において有利に働きます。しかし、完全に静止した点群でも物体を検出することは可能です。
移動点は、測定期間の最初に基準記録を行うことで、点群内で検出されます。この記録で見えるもので、動いていないものはすべて背景として定義されます。これをフィルタリングすることで、転送するデータ量を大幅に削減することができます。屋内では、背景が変化しないことが前提なので、通常はこの処理で十分です。今後の背景の変化(例えば、屋台が遠ざかるなど)を考慮し、運用中に継続的に識別・更新し、背景をダイナミックに減算していきます。これは、あらかじめ定義された期間内に移動しないオブジェクトを背景に加えることで行われます。
どの点がオブジェクトに属するのか?
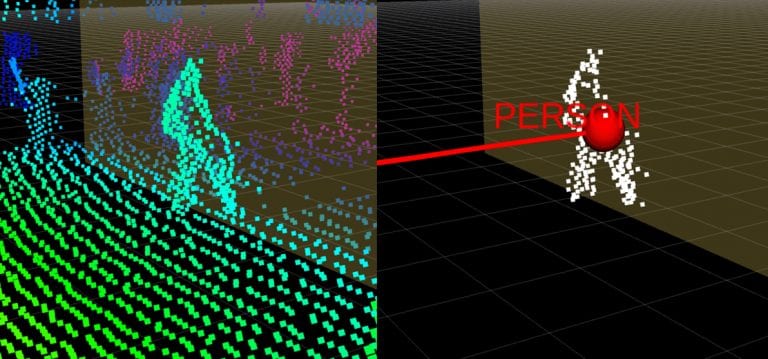
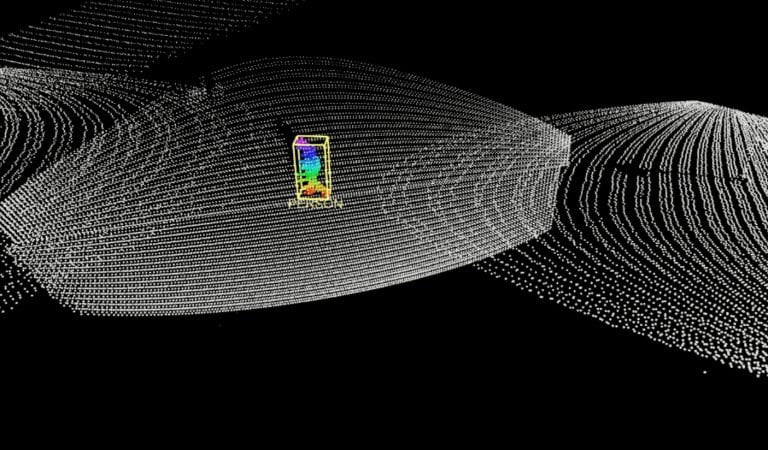
背景を取り除くことで点群からオブジェクト検出の対象とならないものをすべて取り除くと、残るのは前景、つまりオブジェクトだけとなります。このオブジェクトは、「クラスタリング」または「セグメンテーション」によって定義されます。点群中の移動点を検出し、複数の点間の距離を測定します。互いに近い点を1つのオブジェクトにクラスタリングします。この処理は、オブジェクトが移動しない静的な点群でも全く同じように動作します。
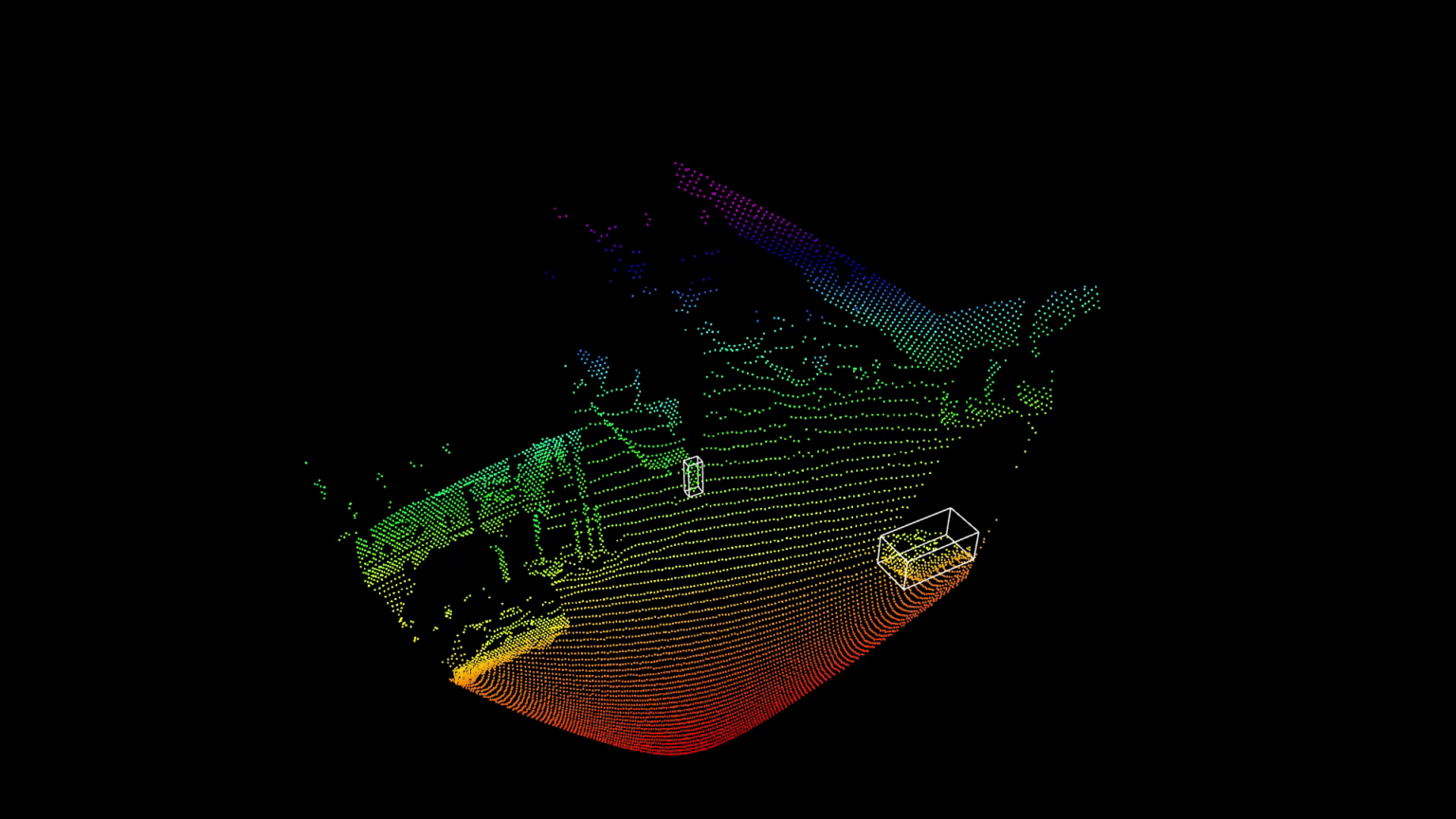
次のステップで、オブジェクトはバウンディングボックスでマークされ、オブジェクトリストに表示されます。このタイプの情報は、さらに処理するのが簡単で、既存のアーキテクチャに簡単に統合することができます。オブジェクトのサイズと形状に一定のルールを設定することで、オブジェクトの種類を識別することができます。この例では、人を検出する場合、特定の高さのスペクトル内にある円筒形のオブジェクトのみをカウントし、人としてマークします。同様に、自動車も特定のパラメータを設定することで検出することができます。
オブジェクトはどのように移動するのでしょうか?
来場者の歩行経路を捉えるために、検出されたオブジェクトを追跡します。これは、前回のオブジェクトの軌跡と確率モデルから、次のフレームでオブジェクトがどこに位置するかを予測することで行われます。例えば、人が左から右へ秒速1mで歩いている場合、確立された方向に同じ速度で歩き続け、次のフレームで特定の場所に位置すると予測されます。そして、次のフレームで検出されたオブジェクトに、移動予測に基づく割り当てを行い、それによってトラッキングを行います。
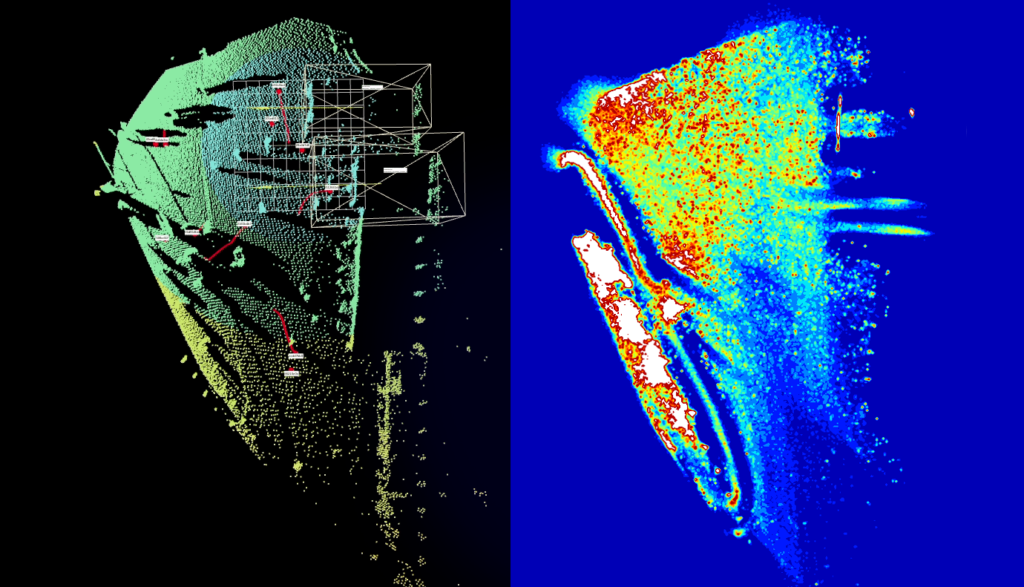
ヒートマップによるグラフィック表示
来場者の歩行経路を記録することで、個々のブースでの配置を分析し、「ヒートマップ」を作成します。どの場所が最も来場者が多く、人気があったかがわかります。次回の開催では、この情報をもとに、場所取りを検討することができます。
w
ヒートマップは、例えば展示会でも非常に有効です。ブースでの来場者を記録し、その経路を分析することで、LiDARセンサーはどの展示物が来場者の興味を引いたか、あるいはそうでなかったかを明確に特定することができます。イベント期間中は、この情報をもとにスタッフの配置を変えたり、ブースのデザインを変更したり、いずれにせよ、これらの洞察をその後のブースプランニングに反映させることができます。
w
洞察を深めるための基本
物体の検出と追跡は、点群の解析の基礎となり、人数のカウント、居住者検出、侵入者検出などのアプリケーションを可能にします。本記事シリーズの第2回目では、これらのアルゴリズムの仕組み、アプリケーションの例、そしてLiDARがバルク材産業をどのように変えることができるのかについてご紹介します。