
世界がよりスマートで効率的なテクノロジーに向かうにつれ、LiDARとそのアプリケーションもより注目されるようになりました。しかし、LiDARテクノロジーやその有効性、関連性、性能に関する神話も多く存在しています。このブログでは、LiDARに関する6つの一般的な誤解や神話を取り上げ、事実に光を当てていきます。
1. 神話:LiDARは複雑なテクノロジーを使用している
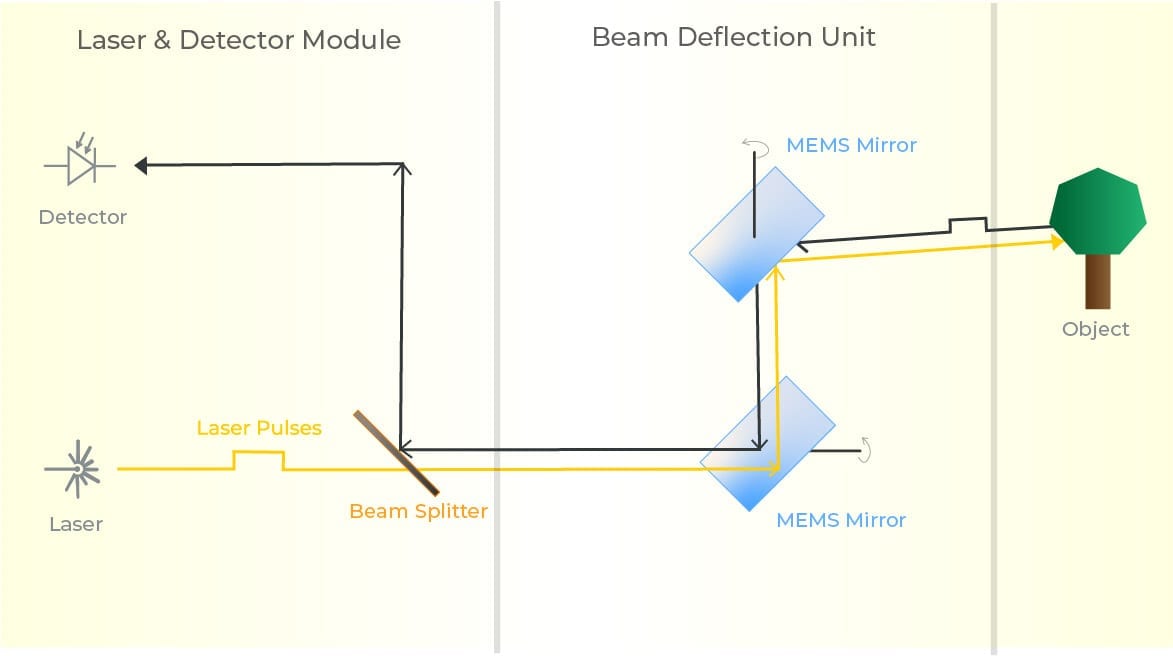
LiDARは、確かに様々なハードウェア部品らなる複雑なセンサーですが、その基本的な動作原理は非常にシンプルです。センサーは、コウモリの音波やレーダーのマイクロ波に似たタイム・オブ・フライト法を利用しています。
センサーをレーザー、検出器、ビーム偏向ユニット(Blickfeld社の場合はミラー)に分解すると、LiDARはそれほど難しいテクノロジーではなくなります。レーザー光源からレーザーパルスを発射し、ミラーで反射させ、その反射光を検出器で検出します。そして、レーザーが発射されてから戻ってくるまでの時間から、正確な距離を計算します。
これを1秒間に何千回、何百万回と繰り返すことで、リアルタイムで正確な3Dマップが生成されます。この3Dマップには、自律走行などの判断に活用しやすいデータが含まれています。
このテクノロジーは、1960年代初頭に、同じ原理で連続波ではなく、光パルスを繰り返し使用するパルスレーザーが発明された後に開発されたものです。
この記事では、LiDARテクノロジーとその動作 について詳しくご紹介しています。
2. 神話:自律走行車のアプリケーションではLiDARは不要
LiDARは、照明や天候に関係なく正確な3Dデータを取得できるため、自律走行車のアプリケーションに不可欠なものです。
Elon Musk氏が2019年のカンファレンスでLiDARの自律走行車への有用性を無視したことは有名で、これがLiDARとその関連性についての多くの神話を今日まで産み出しました。彼は、LiDARはカメラと補完的なインテリジェントアルゴリズムによって不要になると主張し、そのスタンスを貫き続けています。
カメラは色覚に必要であり、さまざまな画像認識技術を使用しますが、前述のように2Dデータしか取得できないという明らかな欠点があるため、視覚の錯覚に騙されたり、距離を誤って判断されたりする可能性があります。このような失敗は、危険であり、致命的であることが、いくつかの悲劇的な例で示されています。
それに対して、LiDARは3Dデータを確実に取得し、正確な距離と寸法を特定することができるため、解釈の余地がないのです。
トンネルを抜けた後の照明の調整や、障害物に隠れた物体の検出など、カメラが「見えない」状況でも、正確な3D LiDARデータを統合することで対応することができます。
また、カメラが生成した2Dアノテーションは、表面的には自律走行車のアルゴリズムを学習させるのに十分な精度に見えるかもしれません。しかし、機械学習(ML)モデルの正確度を低下させ、結果として車両の認識、予測、計画能力を低下させる多くの不正確さが残っています。自律走行を促進する機械学習機能は、スケーラブルで「ロングテール」に対応する必要があります。つまり、道路を走る車両が直面するシナリオの95%に対応するだけでは不十分で、MLベースの自律走行機能は、その性能を継続的に改善しながら、起こり得るケースのうち厄介な5%に対しても学習可能である必要があり、カメラのみのシステムには膨大な学習データが必要です。
それに比べ、LiDARはより正確度の高い学習データを生成しながら、より予測性の高い機械学習モデルを提供することができます。このように、より確実で堅牢な自律走行システムには、LiDARが必要なのです。
3. 神話:LiDARは他のセンサーに完全に置き換えることができる
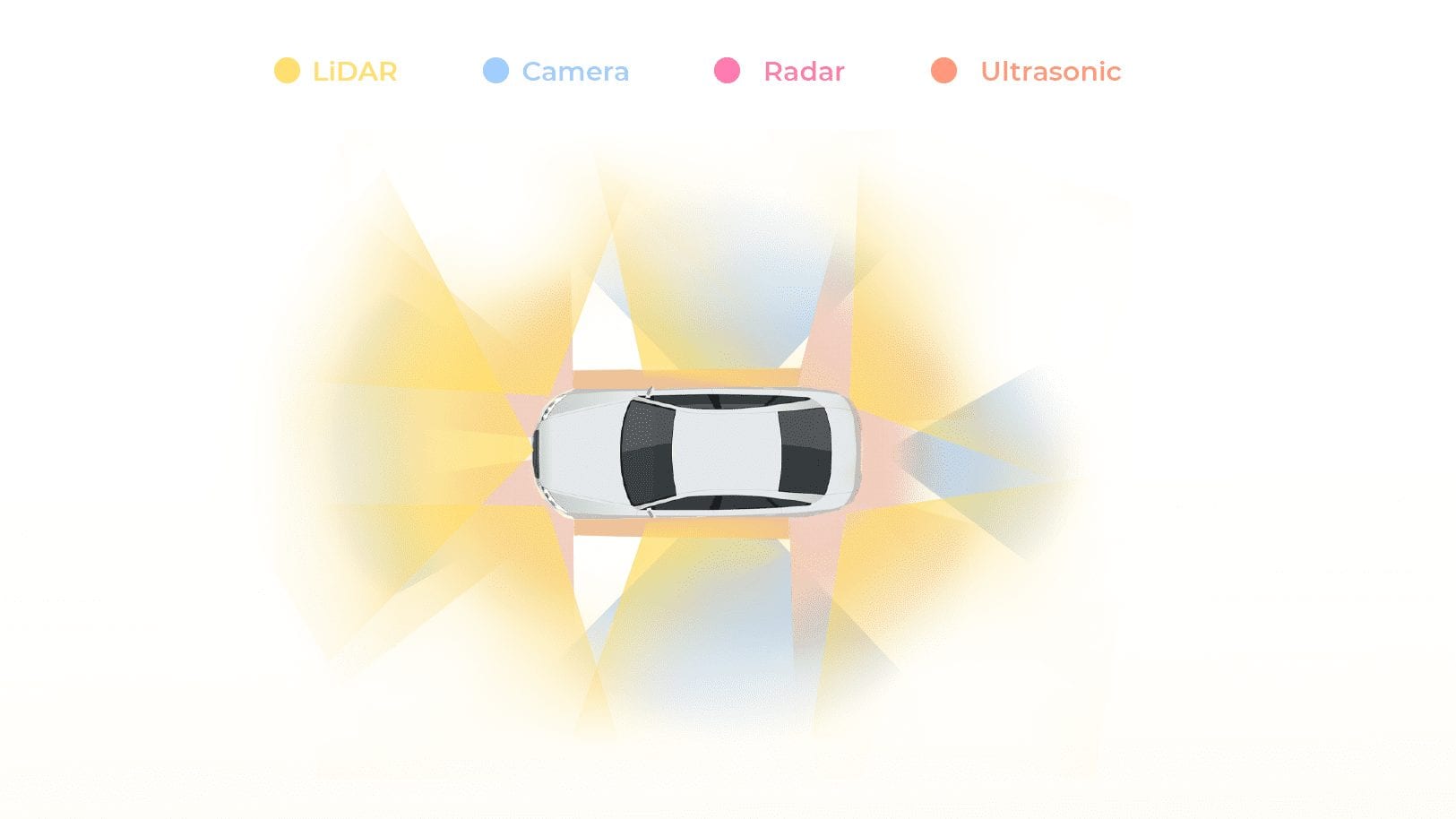
センサーは交換可能なものではなく、多くの複雑なアプリケーションで互いに補完し合う必要があります。
LiDARに関する最も一般的な神話の1つは、カメラやレーダーセンサーで代替可能というものです。これは、これらのセンサーテクノロジーがどのように異なる方法で物体を分類するのかについての理解不足から生じています。これらのセンサーがどのような機能を持ち、どのようなデータを生成するのかを理解することは、センサーが持つ補完的な機能を理解する上で非常に重要です。
- カメラは、グレースケールやカラー情報、テクスチャ、コントラストデータを提供しながら、2D画像で世界の視覚的な表現を描画します。このデータを解析し、さらに応用するためには、画像認識ソフトウェアが必要となります。カメラは受動的な測定原理を採用しているため、対象物を検出するためには照明が必要です。また、3D画像を作成するためには、2台以上のカメラと高い演算能力が必要です。
- レーダーは3次元情報を計測するため、対象物の距離や速度を高い精度で判断することに優れています。しかし、解像度が低いため、対象物を正確に(cm単位で)検出したり、分類したりすることはできません。
- LiDARは、センサーデータから3次元的に点を識別し、点群データを作成します。この点群の大きさをもとに、物体を正確に検出し、人、車、建物など、さまざまなカテゴリーに分類することも可能です。
LiDARは、他のセンサーの欠点を補うべく、非常に詳細で信頼性の高い3次元情報を収集します。LiDARのデータは、さまざまな環境下で最も重要な対象物を検出し、正確に分類することができるのが特徴です。そして、カメラからのデータは、より詳細な分析や図解表現に利用することができます。同様に、レーダーで収集した距離や速度のデータも、LiDARを使うことでより高い正確度で検証することができます。つまり、将来のセンサーベースのアプリケーションはすべて、カメラ、レーダーシステム、LiDAR、そしてその他のセンサーをミックスして統合することになるのです。
すべてのセンサーが一体となって動作する方法については、こちらの詳細なブログでご覧いただけます。
4. 神話:LiDARは劣悪な外部環境では動作しない
LiDARは、悪天候や照明条件下で比較した場合、カメラのような他のセンサーよりもかなりのパフォーマンス上の利点を提供することができます。
一般的にカメラは十分な周囲の明るさがないと作動しませんし、例えば自動車では、カメラはヘッドライトまでしか見ることができません。これに対して、LiDARは可視光ではなく赤外線のレーザー光を利用しているため、照明に関係なく数百メートルまで見ることができます。つまり、LiDARセンサーを搭載した自律走行車は、真っ暗な場所でも昼間と同じように走行することができ、従来のヘッドライトを消した状態でも走行することができます。
霧や雨、雪などの悪条件の場合、LiDARは性能面で明らかな優位性を発揮し、認識システムにおいてカメラなどの他のセンサーの遅れを取り戻すことができます。
雨天の場合、LiDARはその大きな光ビームにより、一般的にカメラよりも優れた性能を発揮する傾向があります。これは、センサーミラー上の障害物(雨滴など)の周りを光が通過するため、LiDARの範囲がある程度影響を受けないままであることを意味します。一方、カメラの画素サイズは雨滴のサイズよりはるかに小さいため、視野角が狭くなります。
また、光束が大きいので、LiDARは異なる距離からの複数のリターンを検出し、最も強い信号を持つものだけを処理することができます。これは、雪のような悪天候の場合にも有効で、雪の結晶の反射は無視され、背景にある硬い物体からの反射だけが処理されることになります。機械学習アルゴリズムのないカメラでは、雪の結晶、濡れたレンズ、硬い物体を区別することができず、すべてのリターンを合成して歪んだ最終画像を作ってしまうのです。
また、LiDARはカメラ(1000分の1秒)よりも露光時間が短く、シャッタースピードも速いため(100万分の1秒)、雨粒が複数のピクセルにまたがって筋状になることはなく、そのままの形状で検出されることになります。

LiDARは光学デバイスであるため、濃霧のような状況では性能に悪影響を及ぼしますが、上の写真に見られるように、カメラと比較してより多くの貴重なデータを提供し、より長い距離で動作させることができます。
5. 神話:LiDARセンサーは高価
MEMSベースのLiDARセンサーの導入により、簡単に生産できるようになり、非常に費用対効果が高くなりました。
かつては、LiDARといえばスピニングLiDARしかなく、非常に高価で大きいため大量生産ができない時代もありました。ですから、今でもLiDARに対する神話や価格の高さが残っているのは当然です。しかし、MEMS(Microelectromechanical Systems)ベースのLiDARが登場してからは、まさにその常識を覆すことになったのです。MEMSコンポーネントはシリコンから製造されるため、製造の拡張性が高く、費用対効果が非常に高いのです。
他の標準部品や定期的なメンテナンスが不要な技術との組み合わせで、ソリッドステートLiDARはより手頃な価格になりつつあります。近年、LiDARセンサーのコストは数千ドルから数百ドルにまで低下しており、この傾向は今後も続くと思われます。実際、中距離用のセンサーは大量に生産すれば3桁の価格で販売することさえ可能です。
6. 神話:MEMSベースのLiDARは高性能ではない
Blickfeld社のLiDARは、独自のMEMSミラーと同軸設計により、光子を高い割合で光検出器に導くことができるため、非常に高い性能を発揮します。
MEMSセンサーは拡張性が高く、低コストであるというメリットがある一方で、これらのデバイスは「検出範囲が狭い」という誤解が広まっています。これは、MEMSのミラーが非常に小さいことに起因しています(MEMSの 「micro 」がそれに該当します)。一般に、ミラーが大きければ大きいほど、集光面積が大きくなり、検出距離も長くなります。Blickfeld社は、10ミリメートル以上の大きさのMEMSミラーを独自に開発し、光子の高い割合を光検出器に導くことを可能にしました。
また、Blickfeld社のセンサーの同軸設計により、非常に効果的な空間フィルタリングが可能となり、光子が送られた方向から正確に収集されるようになりました。これにより、背景光が最小限に抑えられ、非常に高いSN比が実現されるため、さらに測定範囲が広がります。
MEMSベースのLiDARセンサーのパワフルさ、堅牢さ、拡張性<1}については、こちらのブログで詳しくご紹介しています。
以上、LiDARテクノロジーとそのアプリケーションに関する一般的な神話を紹介しました。このシリーズの第2部では、さらに多くの誤解を解き明かします。