
センサーの融合に基づく自律走行
道路交通において最も重要な前提は、道路利用者が静止物や他の車両に衝突しないことです。そのため、安全が最も優先されます。複雑な3次元世界において安全に移動するためには、周囲の物体や車両との十分な距離を常に保つ必要があります。手動で制御される車両では、運転手はこの距離を保ち、他の道路利用者との衝突を回避する責任を負っています。しかし、より高度に自動化されると、車両自身が周囲の状況を感知する責任を負うことになります。したがって、環境検知は自動運転にとって重要かつ不可欠な要素であり、超音波、カメラ、レーダー、LiDARからなるセンサーネットワークが将来の自動車に統合されるでしょう。
しかし、なぜ自動運転にこれほど多くの異なるセンサーシステムが必要なのでしょうか?
LiDARは「障壁」なのでしょうか?
Teslaの最高責任者、Elon Musk氏によると、少なくとも1つのセンサーテクノロジーは自律走行に必要ないそうです。2019年の投資家会議で、彼はLiDARセンサーは不要であり、レーダー技術と組み合わせた有能なアルゴリズムを持つカメラで自動運転機能は十分であると説明しました。LiDARセンサーは高価で大きいため、現在の市販車には搭載できないという彼の主張は、今のところ正しいのかもしれませんが、カメラとレーダーだけに頼るのは、今の世の中、安全とは言えません(まさにこれが Blickfeld社テクノロジーの開発の理由です)。
最近、台湾の高速道路で起きた事件がその理由を示しています。高速道路でトラックが転倒し、車線をふさいでいたました。トラックの白い幌の上側が後続車の方向に向いていました。そこにTeslaがノーブレーキで突っ込みます。幸い、トラックには何も積んでいなかったので、誰も怪我をすることはありませんでした。なぜ、このような事故が起きたのでしょうか?障害物に近づいても減速しなかったことから、いわゆるオートパイロット機能がオンになっていたものと思われます。人間の運転手であれば、少なくとも衝突の少し前までには反応していたはずです。Teslaの自動操縦システムは、LiDARを用いず、レーダーと超音波にサポートされたカメラに依存したセンサー群に基づいています。記録されたカメラデータを解析し、運転判断の根拠とする画像認識ソフトは、横転したトラックという未知の状況に対してどう対処すればよいか分からず、自車線内の物体すら検出できませんでした。カメラシステムがトラックの幌を誤って検知し、その白い表面を障害物と判断しなかったのです。
カメラはクルマの目?
カメラは人間の目と同じように、見たままの映像をカラーで記録します。しかし、カメラで撮影した映像には、距離を測るのに必要な3次元の情報がありません。これは、物体を避けるために必要な能力です。人間の脳は、記録された2次元情報を解釈して距離を推定しますが、カメラには画像認識ソフトが必要なのです。
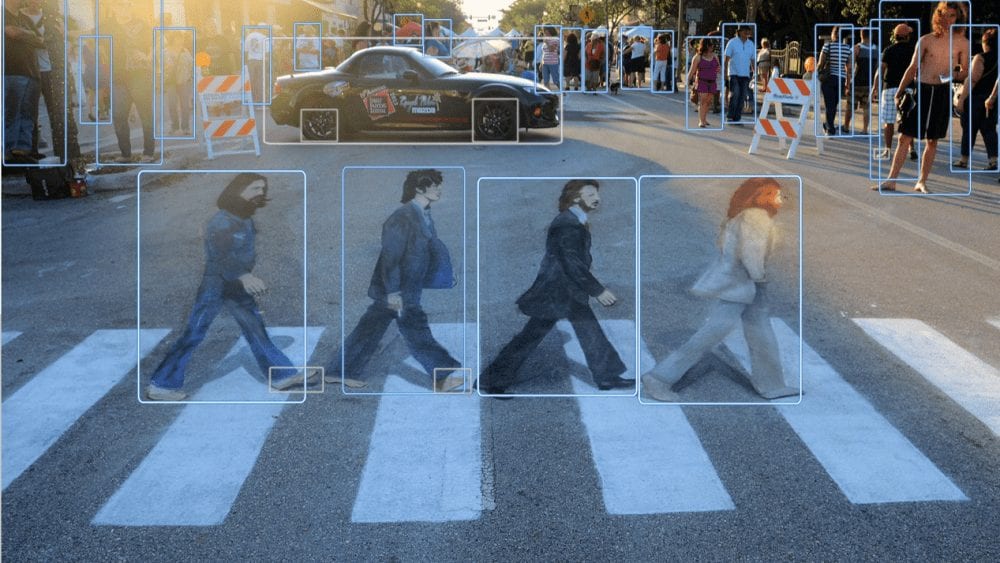
画像認識の問題点:画像を解釈するためには、アルゴリズムが経験した状況をラベル付けして記憶し、学習する必要があります。これは、人工知能、機械学習、そして何千キロものテスト走行(実走行とシミュレーションの両方)によって達成されます。しかし、車両が未知の状況に遭遇した場合、どうなるのでしょうか?このいわゆる「ロングテール」をカバーすること、つまり日常の運転にはない、非日常的な状況をすべて記録することは、まだ解決されていない課題です。この課題がある限り、カメラを自動運転機能の唯一のセンサーテクノロジーとして安全に利用することはできません。カメラのデータをアルゴリズムで解釈する必要があるため、誤差が生じ、結果的に道路利用者の安全が脅かされることになるからです。
LiDARs: 解釈の余地を与えない
LiDARは、レーザー光を照射し、周囲の物体で反射させ、センサーで再び検出することで、道路上に物体があるかどうかを判断するセンサー技術です。そのため、2Dから3Dへの変換が不要で、直接3Dデータを取得することができます。前方に障害物がある場合、LiDARセンサーはそれを早期に検出し、正確な寸法と、何よりも車両までの距離を特定することができます。
物体の分類
しかし、すべての物体がブレーキをかけるべき障害物とは限らないため、車両の進路上にある物体の種類も重要な要素となります。さまざまなセンサー技術が、さまざまな方法で物体を分類しています。例えば、LiDARセンサーは、センサーデータ内の点群を識別します。その大きさに基づいて、対象物を自動車、オートバイ、歩行者など様々なカテゴリーに分類します。また、吹き飛ばされたビニール袋を無害なものと識別するためには、カメラデータの解析が有効で、これにはすでに述べたように画像認識ソフトウェアが利用されます。また、LiDARセンサーは色を記録しないので、例えば道路標識を認識するためにもカメラが必要です。
LiDARを使わない自律走行はうまくいかない
このように、どのセンサー技術にもメリットとデメリットがあり、その正当性が認められます。実際、自動運転機能を持つ自動車の安全性を確保するためには、センサーネットワークに冗長性が必要であることは明らかです。利用可能なセンサー技術のうち、単独で自律走行が可能になるものはありません。前述の台湾での事故のようなケースも、センサーネットワークにおいてLiDARセンサーを軽視してはいけないことを明確に示しています。結局のところ、自動運転車は何よりも安全であることが必要なのです。LiDARセンサーがあれば、自律走行車はこの目標に大きく近づくことができるのです。