
Whether scanning, spinning, or flash technology – all LiDAR sensors have one thing in common: they detect their environment with the help of light. However, after this point, the similarities end, so much so that even the principle of measuring the distances using reflected light differs among the technologies. The two best-known principles are time-of-flight measurement (ToF) and frequency modulated continuous wave (FMCW).
Time-of-Flight: Distance measurement using laser pulses
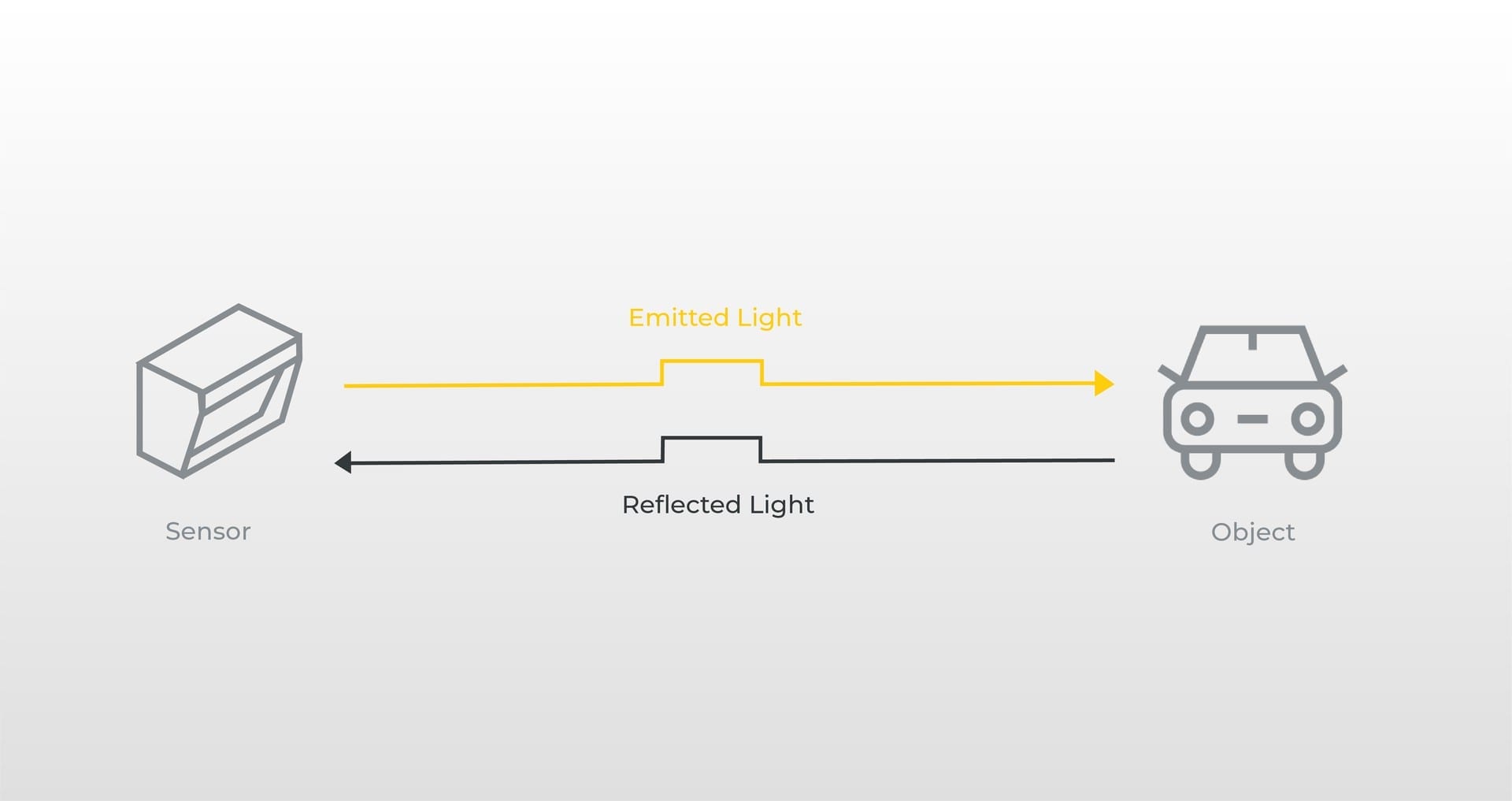
ToF is the most commonly used method in LiDAR systems due to its high data reliability and cost-effective implementation. It works by emitting laser pulses and measuring the time taken for the light to reflect off an object and return to the sensor. This principle is well-established, having been used in LiDAR for many years.
Advantages of ToF:
- Affordability: ToF can be implemented with relatively inexpensive laser sources.
- Data Reliability: The method provides consistent and accurate results across various applications.
However, ToF does have limitations. To achieve a higher range, laser pulses are highly collimated, but their power is restricted by eye safety regulations. There are ways to solve this problem; an intelligent design of LiDAR sensors, for example, with particularly large MEMS mirrors, such as the ones used in the Blickfeld sensors, can also achieve long ranges with the time-of-flight method. Hence this is still the preferred measurement method for many sensors.
Alternative to pulses: Frequency modulation
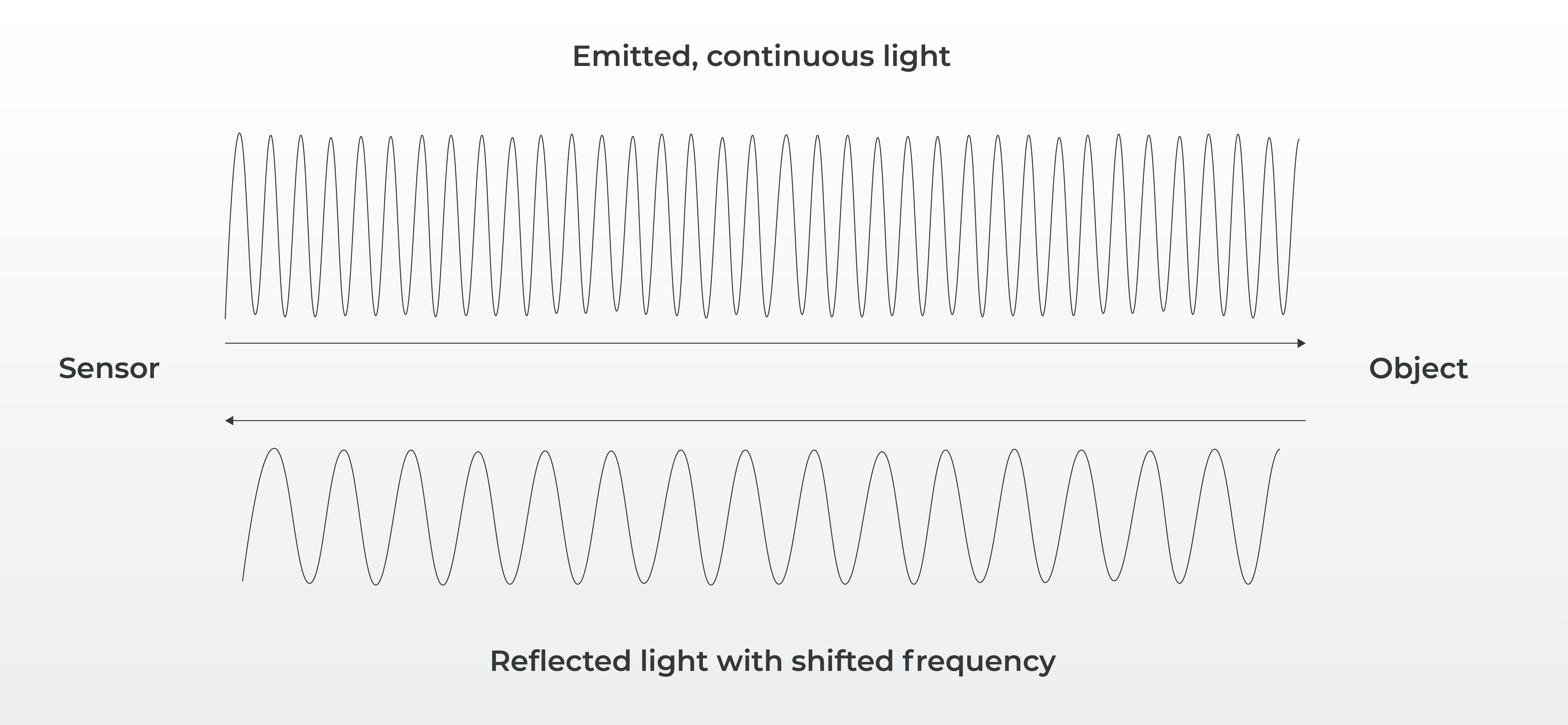
Instead of emitting laser pulses, FMCW continuously emits a modulated laser beam, commonly referred to as “chirped” light. The frequency of this light changes cyclically during emission. When the beam reflects off an object, the reflected light’s frequency is compared to that of the emitted light. The frequency difference (intermediate frequency) is proportional to the object’s distance.
Key Advantage: The FMCW method also directly measures the speed of an object using the Doppler effect, eliminating the need for multiple measurements to calculate velocity, as is required in ToF systems.
Speed Measurement: ToF vs. FMCW
With time-of-flight, the oncoming objects’ speed can also be measured, but not directly as with FMCW. ToF can only measure the distance between sensor and object using the recorded data points, therefore the velocity of objects has to be calculated from several measurements. The speed can be calculated by emitting several pulses from the change in distance between object and sensor in the individual measurements and the pulse frequency.
Signal Quality and Sensitivity
Both ToF and FMCW have mechanisms to maintain high signal quality, even in challenging conditions:
- FMCW: Coherent detectors used in FMCW systems are highly sensitive and filter out unwanted light influences, resulting in an excellent signal-to-noise ratio. This makes FMCW particularly effective for detecting weakly reflecting objects at greater distances.
- ToF: Coaxial sensor designs in ToF systems achieve similar results by ensuring that only light reflected at the same angle as the outgoing light is captured. This design effectively filters out sunlight and interference from other LiDAR sensors, maintaining robust performance in complex environments.
Development Maturity and Market Viability
ToF holds a significant advantage in terms of technological maturity and industrial readiness. Its widespread use has driven costs down, making it the preferred choice for many LiDAR applications, especially in price-sensitive markets like automotive.
On the other hand, FMCW is still in its early stages. The technology requires more advanced and costly laser sources, limiting its current market adoption. However, ongoing advancements aim to integrate FMCW on a single chip, which could dramatically reduce its size and production costs—making it a highly attractive option in the future.
Time-of-Flight still a more established measurement principle
Is frequency modulation the better measuring principle? It depends.
ToF remains the dominant choice for LiDAR sensors today, offering proven reliability, affordability, and ease of implementation. However, FMCW’s potential for direct velocity measurement and enhanced signal quality positions it as a promising contender for future applications, especially as technological innovations address its current cost and complexity challenges.
The choice between ToF and FMCW ultimately hinges on the specific requirements of the application, from cost constraints to performance needs. As LiDAR technology continues to evolve, both principles will play critical roles in shaping the future of autonomous systems and beyond.