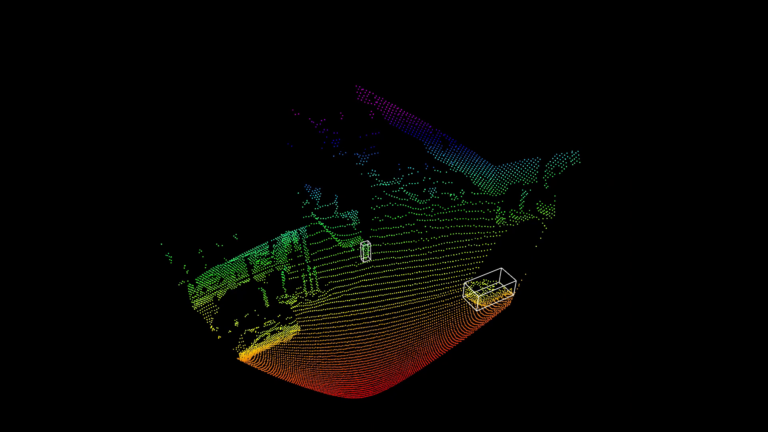
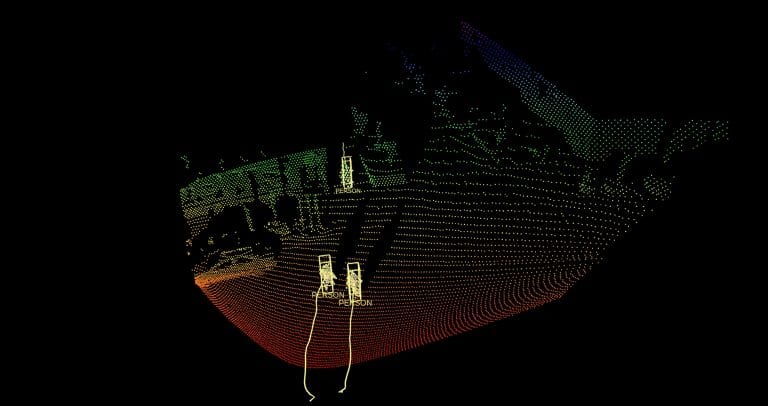
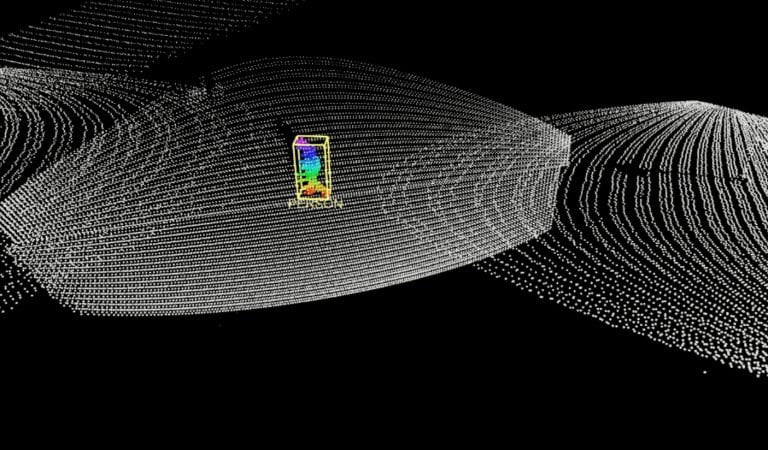
The basis for the implementation of LiDAR-based applications is the extraction of information from the 3D data. In most cases, this information starts with the detection and tracking of objects. How does this work?
How was Blickfeld founded? What does a typical working day look like? What challenges are yet to be overcome, what milestones to be celebrated? Blickfeld's founders will be answering these and other questions over the next few months.
What happens after a LiDAR sensor has collected data? How is information generated from point clouds that can be used to implement applications like crowd management?